7.6. Симулациони примери
Пример 7.1 imvecV_hz.mdl (подмени 3.10.2)
U/f регулација брзине асинхроног мотора
У овом SIMULINK моделу се може анализирати U/f регулација брзине обртања асинхроног мотора. Однос напона и фреквенције се одржава на приближно константној вредности.
Задата је (у релативним јединицама) номинална полазна угаона брзина, која се у тренутку t= 3 s смањује на 50% вредности. Оптерећење је дато у облику одскочне функције која у тренутку t = 2 s са нулте вредности тренутно добија номиналну вредност.
Задата угаона брзина се пореди са оствареном (приказано на слици 7.10) и њихова разлика је сигнал доведен у контролер брзине. Улазни и излазни сигнали контролера су приказани на слици 7.11. Може се приметити да је излазни сигнал лимитиран на максималну вредност 0,03 која се по жељи може мењати двокликом на блок котролера.
Излазни сигнал из контролера се сабира са вредношћу остварене угаоне брзине и добијени сигнал је вредност wk (угаона брзина референтног система, тј. за синхрони референтни систем представља променљиву синхрону угаону брзину којим се регулише постепено убрзавање асинхроног мотора). Тај исти сигнал у релативним вредностима одговара и вредност доведеног улазног напона приказан на слици 7.12.
На овај начин је остварено U/f управљање при чему долази до постепеног повећавања брзине, без великих осцилација електромагнетног момента који је приказан на слици 7.13. При томе улазна струја променљиве амплитуде и фреквенције прати промене брзине и момента у тренуцима t=2 s и t=3 s.
Може се приметити и да је мотор у тренуцима убрзавања развијао електромагнетни момент и до 1,5 р.ј. све до тренутка достизања жељене брзине обртања. Пошто је тада био неоптерећен, момент се тада нагло и осцилујући смањује на вредност 0.
У тренутку t=3 мотор развија негативни кочни момент пошто је задато смањење угаоне брзине за 50%.
Предог за самостални рад:
- мењати праметре контролера брзине и уочити утицај њихове промене на понашање целог система;
- мењати задате вредности угаоне брзине и момента оптерећења и пратити понашање система;
- На улаз сигнала довести константну јединичну вредност, повећати границу засићења контролера брзине и пратити облик добијеног електромагнетног момента. Упоредити ове графике са графицима у симулационим примери 5.1 и 5.9.
Сл. 7.8 SIMULINK модел програма imvecV_hz.mdl
|
|
|

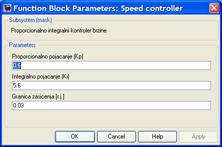
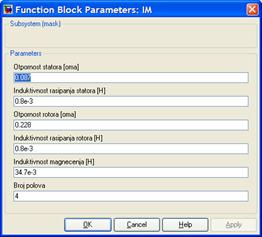
Сл. 7.9 Улазни параметри асинхроног мотора и контролера брзине
Сл. 7.10 Временски дијаграм задате и остварене брзине обртања
Сл. 7.11 Временски дијаграми улазног и излазног сигнала из контролера брзине
Сл. 7.12 Временски дијаграми угаоне брзине референтног система (променљива синхрона брзина) пре и после ограничавача
Сл. 7.13 Временски дијаграми задате и остварене вредности елетромагнетног момента
Сл. 7.14 Временски дијаграми струје статора
Пример 7.2 IMabcspd1.mdl (подмени 3.10.3)
U/f регулација брзине асинхроног мотора са моделом без трансформација
Овај SIMULINK модел симулира исти мотор и радни режим. Једина разлика је у томе што је коришћен оригинални модел без трансформација. Добијени графици су идентични. На слици 7.16 су приказане вредности струја статора и ротора.
Сл. 7.15 SIMULINK модел програма IMabcspd1.mdl


Сл. 7.16 Временски графици струја статора и ротора
Пример 7.3 imvectrol5.mdl (подмени 3.10.9)
Симулација индиректне векторске регулације погона асинхроног мотора коришћењем хистерезисног компаратора
Информација о тренутној брзини асинхроног мотора се пореди са референтном вредношћу и њихова разлика се доводи до контролера брзине.
Брзинска петље користи PI контролер и блок Racunanje iqs* да произведе струју Iq* која служи као команда обртног момента. Преко блока Racunanje id* добија се струја Id* која одговара флуксу ротора. Те струје се затим трансформишу преко блока dq2abc у референтне струје IA*, IB* и IC* које се доводе у регулатор струје.
Машина је у почетку рада у устаљеном стању без оптерећења (Мopt = 0) и има брзину обртања wref = 120 rad/S.
Симулација даје прелазни одзив на промену команде брзине на вредност 150 rad/s у тренутку t=0,1 s и повећање моментa оптерећења Мopt у тренутку t=0,6 s на вредност 200 Nm.
Време за које се достигне нова дефинисана брзина обртања зависи од параметара контролера брзине. У овом блоку се дефинише максимална вредност команде момента. Мењајући овај параметар, мења се време постизања новог стационарног стања и начин на који је остварен. Уколико је он мањи од 200 Nm, машина неће моћи одговорити захтеву повећања момента оптерећења.
Тренутне вредности струја одговарају развијеном електромагнетном моменту (слике 7.24 и 7.25).
На сликама 7.26, 7.27 и 7.28 приказани су одзиви брзине за десет пута повећану максималну вредност команде момента и смањење тачке укључења хистерезисног компаратора десет пута.
Сл. 7.17 SIMULINK модел imvectrol5.mdl
Сл. 7.18 Параметри асинхроног мотора коришћени у симулацији
Сл. 7.19 Подмодел Racunanje fluksa
Сл. 7.20 Подмодел Racunanje id*
Сл. 7.21 Подмодел Racunanje iqs*
Сл. 7.22 Подмодел Racunanje ugla
Сл. 7.23 Временски облик остварене брзине асинхроног мотора
Сл. 7.24 Развијени електромагнетни момент
Сл. 7.25 Временски облици струја статора асинхроног мотора
Промењени параметри контролера брзине и хистерезисног компаратора
Сл. 7.26 Временски облик остварене брзине асинхроног мотора
Сл. 7.27 Развијени електромагнетни момент
Сл. 7.28 Временски облици струја статора асинхроног мотора