6.3 Симулациони примери
Пример 6.1 pwm3.mdl (подмени 1.8)
Импулсно – ширинска модулација трофазног синусоидалног сигнала
Приказана је техника униполарне и биполарне импулсно-ширинске модулације трофазног сигнала. Трофазни PWM сигнал је трансформисан у двофазни ab стационарни систем а затим и у синхрони dq референтни систем.
Приказана је и средња вредност ab сигнала и то за вредности носеће фреквенције: f, 0,5×f i 1,5×f. Разлике се могу уочити и на графицима на којима је приказан резултујући просторни вектор.
Сл. 6.20 SIMULINK модел програма pwm3.mdl
Подмодел ab2dq Подмодел stat2rot
Сл. 6.21 Подмодели програма pwm3.mdl
Униполарна импулсно-ширинска модулација (MOD1)
Сл. 6.22 Подмодел pwm2
Сл.6.23 Временски дијаграми простопериодичних и модулисаних
простопериодичних трофазних сигнала
Пошто модулисани простоперидочни сигнали имају само позитивне вредности, њихов збир у сваком тренутку није 0, па према томе садрже и нулте компоненте. Потребно је од сваког сигнала одузети нулту компоненту (која је једнака трећини њиховог збира). После елиминисања нултих компоненти, добијају се сигнали као на последњој слици 6.23.
Биполарна импулсно-ширинска модулација (MOD2)
Сл. 6.24 Подмодел pwm1
Сл. 6.25 Временски дијаграм сабраног носећег и референтног сигнала
Сл. 6.26 Временски дијаграми простопериодичних и модулисаних
простопериодичних трофазних сигнала
Ма који начин модулације био примењен добијају се двофазни ab сигнали у стационарном референтном систему. На сликама 6.27-6.29 су приказани, за 3 вредности носећег сигнала ( f, 0,5 f и 1,5 f,) ab сигнали и њихова средња вредност.
Сл. 6.27 Носећи сигнал фреквенције f
Сл. 6.28 Носећи сигнал фреквенције 0,5 f
Сл. 6.29 Носећи сигнал фреквенције 1,5 f
Може се са слике 6.30 уочити значај правилног избора фреквенције носећег сигнала.
1,5 f f 0,5 f
Сл. 6.30 Трајекторије просторних вектора за вредности носећег сигнала f, 1,5 f i 0,5 f
На крају примера на слици 6.31 дати су dq сигнали добијени после примењене трансформације ротације у синхроном референтном систему.
Сл. 6.31 dq сигнали после примењене трансформације
Аплет Single-Phase PWM Converter на CD-у ipes\Inverter\e_H_Bruecke.html приказује начин модулације простопериодичног сигнала
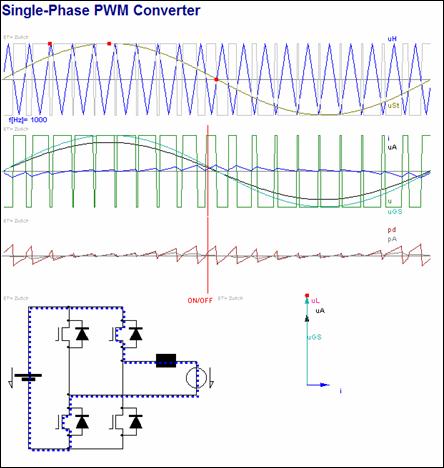
Сл. 6.32 Екрански приказ аплета
Пример 6.2 switchinv.mdl (подмени 1.7)
Управљиво полупроводничко трофазно напајање
Анализа облика фазних, линијских и ab компоненти напона при управљивом полупроводничком трофазном напајању.
На почетку симулације помоћу дефинисаног степенастог сигнала и блока трофазног инвертора дефинисане су фазне вредности напона које су проказане на слици 6.35. После издвајања нултих компоненти, приказане су фазне ABC (слика 6.36) и линијске вредности напона AB, BC и CA (слика 6.37) На слици 6.38 приказане су вредности ab компоненти напона.
Извршена је Фуријеова анализа и приказано је првих 30 хармоника добијеног сложенопериодичног сигнала. (слика 6.39). НА крају, приказана је и трајеторија просторног вектора напона
Сл. 6.33 SIMULINK модел програма switchinv.mdl
Сл. 6.34 Подмодел 3 fazni invertor
Сл. 6.35 Фазне вредности напона Сл. 6.36 ABC фазни напони без нултих комп.
Сл. 6.37 Линијски напони без нултих комп. Сл 6.38 ab компоненте напона
Сл. 6.39 Сложенопериодични сигнал и његова Фуријеова анализа
Пример 6.3 smpm3.mdl (подмени 4.12)
Векторско управљање синхроног мотора са сталним магнетима
Трофазни синхрони мотор номиналних вредности 1.1 KW, 220 V, 3000 min-1 се напаја преко PWM инвертора. У овој демонстрацији, цео систем је формиран од стандардних SIMULINK блокова.
Почетни момент оптерећења је постављен на номиналну вредност (3 Nm) и тренутно се у t=0.03 s смањује на 1 Nm. Две петље регулације се користе: унутрашња петља контролише струју а спољашња брзину. Оријентација поља се добија постављањем idref на нулу. Командни сигнал момента iqref је изведен из контролера брзине.
Анализирајући добијене графике брзине, момента и струја могу се извести следећи закључци:
- У периоду убрзавања машине (t=0-0,0189 s) се може уочити да она развија момент убрзања који са малим осцилацијама одржава на вредности 10,45 Nm. То се постиже помоћу P контролера и команде момента, поредећи жељене и остварене вредности струја статора, чија се разлика доводи у хистерезисни компаратор. Он дефинише потребне вредности струја статора да би се жељени радни режим остварио.
- У
тренутку
достизања
жељене
брзине обртања,
долази до
наглог
смањења
електромагнетног
момента, на
вредност
једнаку
моменту оптерећења.
На графику
струја се
може уочити
нагло
смањење
амлитуде
референтне
струје iqref и iq. График
6.47 приказује
тренутне
вредности
струја фаза A, B и C. Слична
ситуација је
и у тренутку
t= 0,03 s када
долази до
смањења
момента
оптерећења.
- осцилације у вредностима момента и струја се могу повећати или смањити мењајући параметре хистерезисног компаратора. Графици 6.43-6.47 су приказани за вредност тачке укључења хистерезисног компаратора ± 0,1. На графицима слике 6.47 приказане су вредности оствареног електромагнетног момента када је та вредност повећана и смањена 5 пута.
Сл. 6.40 SIMULINK модел програма smpm3.mdl
Сл. 6.41 Подмодел Smpm