5.3 Симулациони примери
Пример 5.1 IMabcstartsim0.mld (подмени 3.4.6)
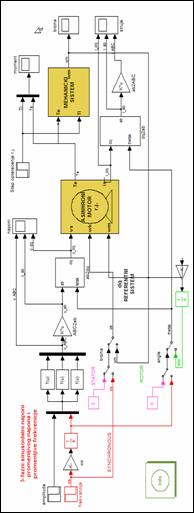
Симулација старта асинхроне машине у оригиналном моделу са abc променљивим у систему релативних јединица
Симулација је изведена помоћу програмског пакета SIMULINK.
Динамички модел АМ се базира на једначинама 5.1 – 5.5.
Модел приказује вредности струја статора, струја ротора, развијеног електромагнетног момента и брзине
У тренутку покретања мотора машина је оптерећена 10% номиналне вредности и после 2 секунде долази до оптерећења мотора.
Извршене су две симулације:
1. Када је у тренутку t=2 s момент оптерећења 130% номиналног оптерећења, и
2. Када је у тренутку t=2 s момент оптерећења 300% номиналног оптерећења
На графицима струја ротора се може приметити како машина реагује на повећање оптерећења: смањује се брзина обртања, струја ротора и фреквенција се повећавају.
На графицима момента се могу уочити велике осцилације електромагнетног момента, које су последица успостављања обртног магнетног поља које нема константну амплитуду све до приближно t=0,7 s (на графику је приказана и амплитуда полифазора[1] статорске струје).
|
|
|
|
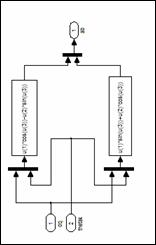
Сл. 5.9 SIMULINK модел IMabcstartsim0.mdl |
|
|
|
|
|
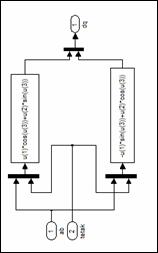
Сл. 5.10 Подмодел dLdtheta |
|
|
Сл. 5.11 Подмодел MATRICA INDUKTOVNOSTI |
Сл. 5.12 Подмодел VEKTOR NAPONA |
|
|
|
![]()
![]()
![]()
![]()
![]()
Сл. 5.13 Дијаграми брзина, момента и струја
при моменту оптерећења 130% Mn у тренутку t=2 s
Сл. 5.14 Дијаграми брзина, момента и струја
при моменту оптерећења 300% Mn у тренутку t=2 s
Пример 5.2 waves_vectors.m (подмени 1.12)
Просторни вектори у машинама наизменичне струје
Програм илуструје облике просторног трофазног сигнала и резултујући просторни вектор који представља њихов збир.
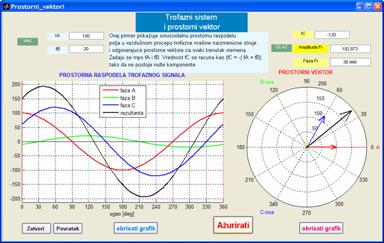
Сл. 5.15 Екрански приказ програма waves_vectors.m
Пример 5.3 rotwavesa.m (подмени 1.14)
Обртно магнетно поље
Програм демонстрира формирање обртног магнетног поља представљеног полифазором који се обрће константном угаоном брзином
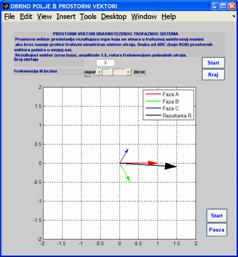
Сл. 5.16 Екрански приказ програма rotwavesa.m
|
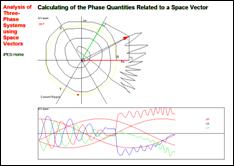
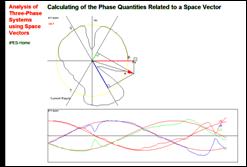
Уколико трофазни систем струја није симетричан, полифазор нема константну амплитуду, што се може илустровати и аплетом који се налази на адреси: http://www.ipes.ethz.ch/ipes/Raumzeiger/e_RZ_ReIm1.html |
|
|
|
|
|
Сл. 5.17 Екрански приказ програма |
|
|
Померањем произвољном брзином врха полифазора по комплексној равни мењају се и компоненте трофазног система, што је приказано на временској оси. Уколико би се полифазор константне амплитуде обртао константном брзином, на временском графику би се добио трофазни симетричан систем. |
|
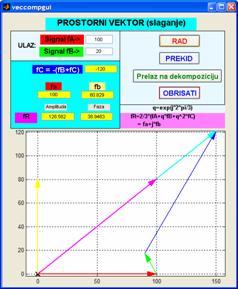
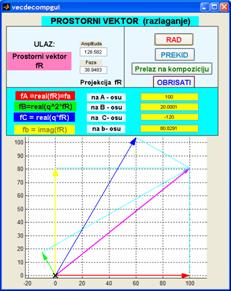
Пример 5.4 veccompgui.m vecdecompgui.m (подмени 1.17)
Геометријски приказ просторних вектора - слагање и разлагање
У дата два примера врши се формирање просторног вектора трофазног симетричног сигнала.
veccompgui.m vecdecompgui.m
Сл. 5.18 Екрански приказ програма veccompgui.m и vecdecompgui.m
У програму veccompgui.m задају се амплитуде сигнала fA i fB. Амплитуда сигнала fC се рачуна тако да је њихов укупан збир 0. Две трећине њиховог векторског збира даје резултујући просторни вектор. Компоненте a и b су дате у правцу апсцисе и ординате.
Програм vecdecompgui.m врши разлагање просторног вектора. Његове пројекције на осе прве, друге и треће фазе дају вредности сигнала тих фаза. Пројекције на осе апсцисе и ординате представљају a и b компоненте после трансформације распрезања.
|
Пример 5.5 spacevec3.mdl (подмени 1.16) |
|
Дефиниција просторног вектора: Кларкова и трансформација ротирања Декартовог координатног система Коришћењем дефинисаних C и D трансформационих матрица, програм даје ab и dq компоненте. После инверзних трансформација, добијају се улазни сигнали. |
|
|
|
Сл. 5.19 SIMULINK модел spacevec3.mdl
|
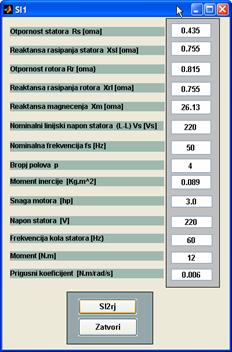
Пример 5.6 SI1.m pu.m (подмени 5.1)
Конверзија параметара асинхроне машине из SI у систем релативних вредности
|
|
|
|
Сл. 5.20 Екранки приказ програма SI1.m и pu.m |
|
Пример 5.7 Dqtransform.mdl (подмени 1.15)
ab и dq трансформација трофазног синусоидалног сигнала променљивог напона и фреквенције
У овом SIMULINK моделу се графички на осцилоскопу приказују улазни трофазни сигнали и њихове трансформисане величине после изведене C трансформације распрезања и D трансфомације ротације и то за следећа 4. случаја:
1. Улазни сигнал је простопериодичан са непромењеном амплитудом и фреквенцијом, у одређеном периоду времена.
2. Улазни сигнал је са растућом функцијом амплитуде и фреквенције, при чему се њихов однос задржава на константној вредности U/f=const.
3. Улазни сигнал је простопериодичан са амплитудом која се скоковито мења (смањује) у одређеном тренутку времена)
4. Улазни сигнал има променљиву и амплитуду и фреквенцију које се мењају по синусном закону
Сл. 5.21 SIMULINK mодел Dqtransform.mdl
Сл. 5.22 Подмодел ab2dq
impuls ramp step sin
Сл. 5.23 Резултати симулације
|
Пример 5.8 spacevec1.mdl (подмени 1.18) |
|
|
Представљање просторног вектора трофазног сигнала - abc, ab i dq трансформације У овом примеру су коришћене комплексне трансформације (F трансформација распрезања и G трансформација ротације) и реалне трансформације (C трансформација распрезања и D трансфорамција роторације ). После изведене F трансформације извршено је раздвајање реалних и комплексних делова, чиме су добијене ab компоненте приказане на осцилоскопу ab komponente. Извођењем инверзне F трансформације поново се добијају оригинални сигнали на осцилоскопу BC komponente. Извођењем реалне C трансформације добијају се сигнали са осцилоскопа BC komponente1 који су идентични са сигналима приказаним на осцилоскопу ab komponente Када се на сигнале ab (у програму означене са ab) примени комплексна G трансформација и изврши раздвајање реалних и комплексних делова, добијају се сигнали у dq трансформацији (на осцилоскопу dq komponente). Исти сигнали се добијају ако се после реалне C трансформације примени реална D трансформација приказана на осцилоскопу dq komponente1. |
|
|
Сл. 5.24 SIMULINK модел spacevec1.mdl |
|
|
|
|
|
|
|
|
Реална D трансформација ab2dq |
Комплексна F трансформација ABC2sp |
|
|
|
|
Иннверзна комплексна F трансформација sp2ABC |
Ккомплексна G трансформација stat2rot |
|
Сл. 5.25 Подмодели програма spacevec1.mdl |
|
|
|
|
|
ABC komponente ab komponente 1
dq komponente 1 Сл. 5.26 Оригинални и трансформисани сигнали
|
|
Пример 5.9 imvecss0.mdl (подмени 3.2)
Статичке карактеристике изведене из динамичког модела
Ова демонстрација илуструје како се добијају статичке карактеристике асинхроне машине коришћењем динамичког модела и изведених једначина 5.41-5.49
|
Сл. 5.27 SIMULINK модел imvecss0.mdl |
|
|
|
|
|
Сл. 5.28 Подмодел Imvecss0/IM |
|
|
|
|
|
а) ZAVISNOST STRUJE OD FLUKSA према једначинама 5.48 и 5.49 |
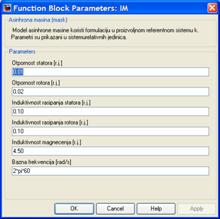
б) Улазни параметри асинхроног мотора |
|
Сл. 5.29 а) Блок шема б) Вредности улазних параметара |
|
|
Сл. 5.30 Резултати симулације програма imvecss0.mdl
|
|
Пример 5.10 im3frames.mdl (подмени 3.4.1)
Симулација покретања асинхроног мотора и приказ струја у abc, ab и dq статорском, роторском и синхроном референтном систему
Ова демонстрација илуструје полазак асинхроног мотора. Мотор креће неоптерећен. После прелазног режима, успоставља се синхрона брзина обртања.
У тренутку t=1,4 s долази до тренутног смањења фреквенције на 5/6 номиналне вредности. Мотор реагује смањењем синхроне брзине обртања.
У тренутку t=1,7 s мотор се оптерећује номиналним моментом оптерећења, који проузрокује смањење брзине обртања и појаву струје у колу ротора.
|
|
|
|
|
|
|
|
|
Сл. 5.31 SIMULINK модел и подмодели програма im3frames.mdl |
||
Сл. 5.32 Временски график брзине обртања
Сл. 5.33 Временски график развијеног електромагнетног момента
Сл. 5.34 Временски графици напона, струја за статорски референтни систем
Сл. 5.35 Временски графици напона, струја за роторски референтни систем
Сл. 5.36 Временски графици напона, струја за синхрони референтни систем
Пример 5.11 smstart0.mdl (подмени 4.2)
Симулација поласка и промене оптерећења синхроног мотора
Момент оптерећења је релативне вредности Mopt=0,2. У тренутку t= 5 s, долази до прикључења напона на крајеве побудног намотаја на ротору и до промене отпорности кола побуде. У тренутку t= 10 s, долази до повећања оптерећења на номиналну вредност.
Анализирајући приказане графике може се закључити:
- све до тренутка укључења побуде, мотор је радио асинхроно и угао између ротора и обртног поља статора се мењао у границама 0-360о;
- У тренутку укључења побуде, долази до уласка машине у синхронизам, и угао оптерећења се са устаљује на приближну вредност 70;
- У тренутку пуног оптерећења, долази до „њихања“ машине и повећања угла оптерећења на 400;
- Развијени електромагнетни момент је у почетку асинхрони, а после укључивања побуде долази до појаве пригушених осцилација;
Сл. 5.37 SIMULINK модел програма smstart0.mdl
Сл. 5.38 Подмодел Napon indukta
Сл. 5.39 Подмодел SM
Сл. 5.40 Зависност угла оптерећења од времена
Сл. 5.41 График М=f(t)
Сл. 5.42 График w=f(t)
Сл. 5.43 График M=f(w)