Сл. 3.21 Биполарна
модулација
за индекс
модулације m=0,725
Сл. 3.22 Облици
напона и
струје на RL потрошачу
za m=0,705
Аплет
Basиcs of Pulse Wиdth Modulatиon (PWM) на CD-у иpes\иpes\PWMsиmpel.html
приказује
начин
модулације једносмерног
сигнала
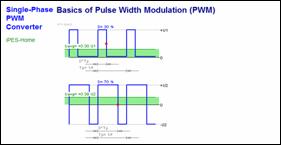
Сл. 3.23 Екрански
приказ
аплета
Пример 3.2 rec2.mdl (подмени
1.23)
Једнофазно
исправљачко
коло
Моделовати
редно RL
коло са диодом
прикључено
на синусни
напон.
Диода
је
моделована
са
отпорношћу
која има две
вредности, у
зависности
да ли она
проводи или
не. Када
се отпорност
кола смањује,
струја све дуже
тече кроз
коло. У
граничном
случају када
је отпорност
нула, струја
има само
позитивне
вредности и
не мења се. Ситуација
је иста као и у
почетном
тренутку
када нема
диоде. Пошто
има диоде,
струја не
може да тече
у супротном
смеру и како
нема
отпорника на
коме би се
електромагнетна
енергија калема
трошила,
остаје
вредност струје
као у
почетним
тренутку
када не би
било диоде.
Сл. 3.24 SIMULINK
модел rec2.mdl Сл. 3.25 Подмодел
dioda
Сл.
3.26 Временски
облици
улазног и
излазног
напона за
различите
вредности
отпорности
кола
Сл.
3.27 Временски
облици
напона на
диоди за
различите
вредности
отпорности
кола
 Сл. 3.28 Временски
облици струје
за различите
вредности
отпорности
кола
Сл. 3.28 Временски
облици струје
за различите
вредности
отпорности
кола
Пример 3.3 dcpwm1.mdl (подмени
2.4)
PWM побуда
мотора ЈС
Извршити
симулацију
рада мотора
ЈС са
напајањем
напонским
сигналом
који је униполарно
импулсно
ширински
модулисан.
У
примеру су
задата два прелазна
режима:
- први
се дешава у
тренутку t= 0,1 s, када
се машини ЈС,
која је била
оптерећена
номиналним
моментом, тренутно
промени
момент
оптерећења и
то на релативне
вредности
номиналног
момента 0,25, 0,5 0,75 и 1.
Од тог
тренутка се
упоредо
посматра симулација
за 4 различите
вредности
момента.
- у
тренутку t= 0,5 s
долази до
наглог
смањења
улазног
напона са
ефективне релативне
вредности 0,8
на 0,3. То се може
и приметити
на графику 3.33.a) где
је дошло до
промене
сигнала из PWM јединице.
У том
тренутку,
мотор ЈС је
прешао у
генераторски
режим рада. Разлог
је брзина
обртања, која
није могла
тренутно да
се смањи, и
која проузрокује
сразмерну
емс. Емс тада постаје
већа од
прикључног
напона чиме и
струја
индукта мења
свој смер.
Како мотор
успорава, и
емс је све
мања, струја
индукта се
смањује и на
крају
прелазног режима
мења смер и добија
вредност
коју је имала
у тренутку t= 0,5 s. То је због
тога што је момент
оптерећења
све време био
непромењен, а
струја
индукта је сразмерна
са моментом.
Сл.
3.29 SIMULINK модел dcpwm1.mdl
Сл. 3.30 Подмодел pwm Сл. 3.31 Подмодел sr vrednost (sr
vrednost1)
Сл.
3.32 Подмодел dcmotor 1


а) б) в) г)
Сл.
3.33 Временски
дијаграми
напона,
струја,
брзине
обртања и
момента
Сл.
3.34 Времески
дијаграм
струје
индукта у
целом трајању
симулације
Сл.
3.35 Временски
дијаграм
врзине
обртања у
целом трајању
симулације
Пример 3.4 dcpwm21.mdl
(подмени
2.5)
PWM побуда
мотора ЈС
Извршити
симулацију
рада мотора
ЈС са напајањем
напонским
сигналом
који је
биполарно
импулсно
ширински
модулисан.
Пример
је идентичан
претходном
само што у тренутку
t= 0,5 s не
долази до
смањења прикључног
напона.
Разлика је у
начину импулсно-ширинске
модулације
која
проузрокује
улазни напон
оба поларитета,
док је
ефективна
вредност
иста у оба примера.
У
овом примеру
зумирани су
делови
графика
струја и
брзина у
тренутку смањивања
момента
оптерећења.
На графицима се
виде и зумирани
тестерасти
облици
струје
индукта.
Сл.
3.36 SIMULINK модел dcpwm21.mdl
Сл.
3.37 Облик
напона
индукта у
периоди
времена 10 ms
Сл.
3.38 Брзине
обртања за
различите
вредности момента
оптерећења
Сл.
3.39 Струје
индукта за
различите
вредности
момента
оптерећења
Сл.
3.40 Зумиран
део графика
струја
индукта
Пример 3.5 dcrec0.mdl (подмени
2.6)
Контролисани
мрежни
исправљач
Извршити
симулацију
рада мотора
ЈС са
напајањем
напонoм
добијеним из контролисаног
мрежног
исправљача.
Извршене
су две
симулације
за различите
углове
паљења
тиристора p/4 и 3p/4.
Приказани су
временски
дијаграми
напона,
струја и
брзине
обртања. У
тренутку t= 1 s дошло је до потпуног
растерећења
мотора.
За
други случај,
средња
вредност
напона је
негативна, па
је и струја
негативна и
мотор се
обрће у
супротном смеру.
За овај
случај је
промењена и
почетна
вредност
брзине
обртања (промењен
јој је знак).
Сл.
3.41 SIMULINK модел dcreco.mdl
Сл.
3.42 Подмодел dcmotor 1
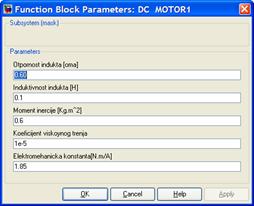
Сл.
3.43 Вредности
унетих
параметара
мотора
Сл.
3.44 Напон
индукта за
угао паљења
тиристора p/4
Сл.
3.45 Струја
индукта за
угао паљења
тиристора p/4
Сл.
3.46 Брзина
обртања за
угао паљења
тиристора p/4
Сл.
3.47 Напон
индукта за
угао паљења
тиристора 3p/4
Сл.
3.48 Струја
индукта за
угао паљења
тиристора 3p/4
Сл.
3.49 Брзина
обртања за
угао паљења
тиристора 3p/4