2. ДИНАМИЧКИ МОДЕЛ МАШИНЕ ЈЕДНОСМЕРНЕ СТРУЈЕ
2.2. Симулациони примери
Пример 2.1 zaletmotJS.m fjazaletmotJS.m
Анализа залетања мотора ЈС
Познати
су параметри
еквивалентне
шеме мотора
ЈС са
независном
побудом: Ra=0,18 W, Rf=3,5 W, La=0,0062
H, Lf=0,0095 H, Laf=0,1 H, J=0,04 Nm2,
Bm=0,007 Nm s rad-1. Напон
на крајевима
кола индукта
је Ua=100 V. Напон на
крајевима
побудног
навоја Uf=20 V. Ако је
момент
оптерећења Mopt=10 Nm, приказати
временске
облике
струја кола индукта,
кола побуде и
брзине
обртања. Стационарне
вредности
ових
параметара
израчунати и
аналитички.
За приказ временских облика струја кола индукта, кола побуде и брзине обртања, користи се програмски пакет MATLAB и програм zaletmotoraJS.m и функција fjazaletmotJS.m чији је листинг следећи:
zaletmotoraJS.m
t0=0; tfinal=0.8; t01=1e-7; trace=1e-7; y0=[0 0 0];
[t,y]=ode45('fjazaletmotJS',t0,tfinal,y0,t01,trace);
subplot(1,3,1); plot(t,y(:,1),'-');
xlabel('Vreme [s]'); title('Struja indukta [A]'); grid
subplot(1,3,2); plot(t,y(:,2),'-');
xlabel('Vreme [s]'); title('Struja pobude [A]'); grid
subplot(1,3,3);plot(t,y(:,3),'-');
xlabel('Vreme [s]'); title('Ugaona brzina [rad/s]'); grid
fjazaletmotJS.m
function prviizvod=izvod(t,y);
ra=0.18; rf=4; La=0.0062; Lf=0.0095; Laf=0.1; J=0.04; Bm=0.007;
T1=10;
ua=100; uf=20;
prviizvod=[(-ra*y(1,:)-Laf*y(2,:)*y(3,:)+ua)/La;...
(-rf*y(2,:)+uf)/Lf;...
(Laf*y(1,:)*y(2,:)-Bm*y(3,:)-T1)/J];
Сл. 2.2 Временски дијаграми струје индукта, струје побуде и угаоне брзине обртања
У стационарном стању једначине 2.1, 2.2 и 2.5 добијају поједностављене облике из којих се могу израчунати тражене стационарне вредности:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Пример 2.2 prostorstanjaJM.m
Коришћењем изведеног модела у простору стања извршити симулацију за податке у Примеру 2.1
Написан је програм prostorstanjaЈМ.m чији графици су идентични графицима добијеним у програму zaletmotJS.m
%Definisanje parametara motora
ra=0.18; rf=4; La=0.0062; Lf=0.0095; Laf=0.1; J=0.04; Bm=0.007;
ua=100; uf=20;
% Definisanje vremenskih konstanti
Ta=La./ra; Tf=Lf./rf; Tm=J./Bm;
Psif=Laf.*uf/rf;
% Definisanje matrica prostora stanja
A=[-1./Ta - Psif./(ra.*Ta); Psif /(Bm.*Tm) -1./Tm];
B=[1./(ra.*Ta) 0; 0 -1./(Bm.*Tm)];
C = [1 0];
% vreme trajanja simulacije sa korakom 10 ms
t = 0:0.01:.8;
% defiisanje napona Ua =100 V i momenta opterecenja Mopt=10 Nm za sve
% vreme trajanja simulacije
u = [0*t+100;0*t+10]
% definisanje pocetnih vrednosti struje indukta i ugaone brzine
x0 = [0 0];
% resavanje jednacine koriscenjem funkcije lsim
[y,x] = lsim(A,B,C,0,u,t,x0);
%crtanje grafika
ia = x(:,1); % struja indukta
subplot(121); plot(t,ia); xlabel('Vreme [s]'); title('Struja indukta
[A]'); grid
w = x(:,2); % ugaona brzina
subplot(122); plot(t,w); xlabel('Vreme [s]'); title('Ugaona brzina
[rad/s]'); grid
Пример 2.3 dcmot0.mdl (подмени 2.1) [1]
Извршити симулaцију рада мотора ЈС са константном побудом
У тренутку t=0,2 s симулирано је смањење момента оптерећења са номиналне на 50% номиналне вредности. У тренутку t=0,8 s долази до смањења прикључног напона са релативне вредности 1 на вредност 0,75 и 0,5 (истовремено се врше две симулације).
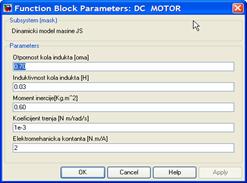
Параметри мотора ЈС се уносе у посебном блоку мотора ЈС.
У SIMULINK-у је према једначинама 2.9 и 2.10 формиран модел у коме су улазни параметри прикључни напон и момент оптерећења, док су излазни параметри струја индукта и брзина обртања.
На слици 2.4 су графички су приказани дијаграми струје индукта и брзине обртања.
Са временског графика струје индукта, може се приметити да, у тренутку наглог смањења прикључног напона, струја индукта мења знак и машина прелази у режим генераторског кочења. Са смањењем брзине смањује се и електромоторна сила ea која после трајања прелазног процеса постаје мања од напона ua и машина се враћа у моторни режим рада.

а) б)
Сл. 2.3 а) SIMULINK модел програма dcmot0.mdl б) Блок дијаграм модела мотора ЈС
Сл. 2.4 Временски дијаграми струје индукта и брзине обртања
Пример 2.4 dcmot0mod0.mdl (подмени 2.1.1)
Анализирати динамички режим рада мотора ЈС при променама прикључног напона, отпорности у колу индукта и момента оптерећења.
Модификујући претходни симулациони модел, могуће је извршити моделовање графика природне и вештачких каратеристика n=f(М), уводећи блок XY Graph.
Изабран је следећи радни режим:
-t=0-1 s: Мотор је прикључен на номинални напон, док се момент оптерећења линеарно повећава до релативне вредности 1. Радна тачка се креће по природној карактеристици 1 од тачке 0 до 1.
- t=2-3 s: Долази до тренутног смањења напона на релативну вредност 0,8. Мотор прелази у режим генераторског кочења, Индукована емс, која је сразмерна са брзином обртања, је сада већа од прикључног напона и струја мења смер. На графику 2.5 се може уочити релативно велика вредност развијеног кочног момента (и струје), са максималном вредношћу у тачки 2 (иако је дошло до смањења напона за само 20%). Са природне карактеристике, мотор прелази на вештачку карактеристику 2 – и преко тачке 3 постиже стационарно стање у тачки 4.
- t=3 s: У овом тренутку, мотор се нагло растерећује на релативну вредност 0,6. Последица је померање радне тачке од 4 до 5.
- t=4 s: Програмски је дефинисано да се у овом тренутку додаје вредност отпора у колу ротора Rd=4 Ra. Мотор скоковито прелази на нову вештачку карактеристику 3 и на тачку 6.
- t=4 -6s: Мотор успорава и из тачке 6 прелази у тачку 7 не постижући устаљену вредност У међувремену у t=5 s дошло и до смањења момента са 0,6 на 0,4 [r.j.].
- t=6 s Напон се нагло смањује на релативну вредност 0,6. Радна тачка скоковито прелази у радну тачку 8.
- t=6 -7s: У периоду од једне секунде долази до континуалног смањења напона напајања. Радна тачка по карактеристици 4 из 8 прелази у 9.
- t=7 s: Напон напајања је 0. Мотор електродинамички (реостатски) кочи по карактеристици 5, радна тачка пролази кроз координатни почетак, и пошто је момент оптерећења потенцијални (не мења знак са променом брзине), убрзава машину у супротном смеру обртања до тачке 10 не достижући устаљену вредност момента оптерећења 0,4 [r.j.]
- t=10 s: Напон се тренутно повећава на номиналну вредност. Радна тачка из 10 прелази у 11 и по карактеристици 6 стиже у радну тачку 12 када се симулација прекида без постизања стационарног стања.
Сл. 2.5 Природна и вештачке карактеристике оптерећења n=f(M)
Сл. 2.6 Временски дијаграми напона напајања, момента оптерећења,
брзине и развијеног електромагнетног момента
Пример 2.5 dcmot2.mdl (подмени 2.2)
Симулaција покретања мотора ЈС са константном побудом, линеарним повећавањем напона за 3 вредности рампе
Истовремено се врше 3 симулације, са линеарним повећањем напона од почетне, нулте вредности, до достизања номиналног напона U=240 V. Време за које се достиже номинална вредност напона је различита и дефинисана нивоом рампе (вредношћу напона која се постигне за t = 1 s).
Треба приметити да се струја у периоду линеарног повећања напона одржава на константној вредности, јер се брзина линеарно повећава а са њом и индукована емс која држи равнотежу прикључном напону. Када напон достигне номиналну вредност, долази до смањења струје на стационарну вредност.
Сл. 2.7 SIMULINK модел програма dcmot2.mdl
Сл. 2.8 Блок дијаграм модела мотора ЈС и временски облици напона
Сл. 2.9 Временски облици струја и брзине мотора ЈС
Пример 2.6 dcstart1.mdl (подмени 2.3)
Извршити симулaцију покретања мотора ЈС са константном побудом симулацијом коришћења роторског упуштача.
Коришћена је lookup табеле, којом је дефинисана зависност укупне отпорности кола индукта од брзине обртања. Отпорности су израчунате тако да се не пређе унапред задата максимална вредност струје индукта.
Програм симулира рад са роторским упуштачима.
На графику 2.14 може се пратити полазак мотора коришћењем роторског упуштача
Сл. 2.10 SIMULINK модел програма dcstart1.mdl
Сл. 2.11 Lookup табела зависности укупне отпорности кола ротора од брзине обртања
Сл. 2.12 Временски дијаграм струје индукта
при промени укупне отпорности кола индукта
Сл. 2.13 Временски дијаграми брзине обртања
при промени укупне отпорности кола индукта
Сл. 2.14 График динамичкие карактеристике n=f(i) при промени отпорности кола индукта