Вежба
5. Примена
рампи при
покретању и
заустављању
погона са
асинхроним
мотором
Задатак
вежбе:
а)
Упознати
могућности
употребе две
различите линеарне
рампе убрзања
и успорења.
б) Упознати
могућности
употребе
осталих типова рампи.
Вежба
5а. - Упознавање могућности
употребе две различите
линеарне
рампе убрзања
и успорења.
Опис
вежбе и
спојна шема
Директним
прикључивањем
асинхроног
мотора на
називни
напон и
фреквенцију
долази до
појаве
великих
убрзања
(струја) која
у великом
броју
случајева
нису пожељна.
Као пример
може
послужити
погон за
покретање
лифта, где је
потребно
остварити
постепено
убрзавање
како
корисници
лифта не би осетили
нелагодности
код подизања
(осећај
„полетања“) и
код спуштања
(осећај
„пропадања“).
Употребом
различитих
типова рампи
фреквентног претварача
ова стања се
могу избећи.
Рампа
представља унапред
дефинисан
профил
брзине, и
дефинисана
је
параметрима
времена
убрзања и времена
успорења,
приказ рампе
и електрична
шема којом се
може
реализовати овај
погон дата је
на слици 3.1.
|
|
|
|
Слика
3.1. Параметри
једноставне
линеарне рампе
и шема
везивања |
|
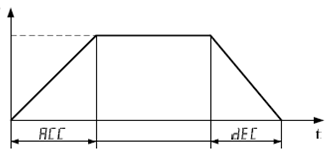
Прекидачи
Р1 и Р2 су
намењени за
стартовање и
избор смера
обртања,
односно у
конкретном
случају за
избор
кретања
лифта (P1-подизање,
P2-спуштање).
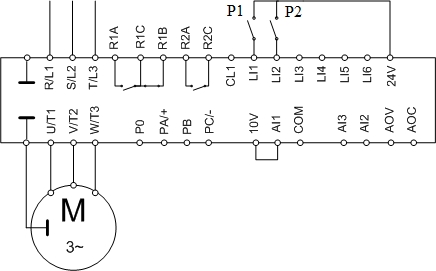
Уколико је у
менију I-O одабрано
2-жично
управљање,
фабрички је
подешено да
логички улаз LI1 буде
задужен за
један смер
обртања, а LI2 за
супротан.
Слика
3.2. Двожично
управљање -
захтеви за
старт и стоп
су дати
затвореним
или
отвореним стањем
логичких
улаза
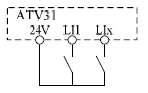
Уколико
је у менију I-O одабрано
3-жично
управљање,
фабрички је
подешено да
је логички
улаз LI2
задужен за
један смер
обртања, а LI3 за супротан.
Да би се
остварила
старт
команда на
улаз LI1 мора
константно
да буде
доведено 24V, што
се постиже
преко NC-тастера.
Слика
3.3. Трожично
управљање-захтеви
напред, назад
или стоп се
дају
импулсима на
логичке
улазе
Да
би
реализовали
погон са две
рампе потребно
је
активирати
функцију Frt (FUn→rPC→Frt),
како би се
омогућио
приступ
функцији АC2 (dЕ2) у
менију SEt. АC2 (dЕ2)
представља
време трајања
друге рампе
убрзања
(успорења). Frt је
фреквенција
при којој
долази до
промене
убрзања
(слика 3.4).
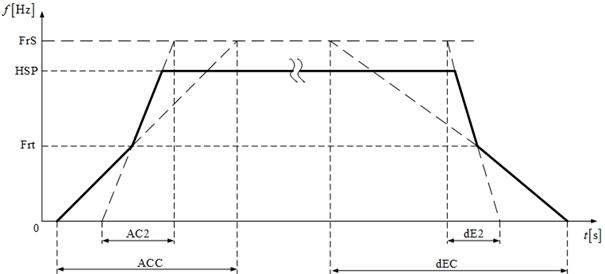
Слика
3.4. Дијаграм
промене
фреквенције
(брзине) са
две рампе
убрзања и
успорења
По
давању
налога за
старт, мотор
ће почети залетање
по одговарајућој
рампи
намењеној за
„мекан“
полазак лифта.
Након
достизања
фреквенције Frt,
мотор
наставља да
убрзава по
другој рампи до
брзине која
одговара
референтној
фреквенцији,
са већим
убрзањем,
како
залетање не
би трајало
предуго.
Потребно
је подесити
времена
трајања
појединих
убрзања. Да
би се остварио
овакав погон
са слике 3.4, прво време
трајања
рампе
убрзања (ACC) треба
да је веће од
другог
времена
трајања рампе
убрзања (АC2). Исто
важи и за
времена
трајања
рампи успорења.
Пре
подешавања
везаних за
ову вежбу
потребно је у
менију drC
подесити
параметре
мотора који
ће се користити
и извршити
самоподешавање,
на начин који
је описан у
претходној
вежби. У овом
менију
потребно је
још подесити
параметар UFt-
избор односа
напон/фреквенција.
Лифтови представљају
системе са
константном
моментном
каракеристиком,
па UFt
треба
подесити на n-векторско
управљање
без сензора,
за терете са
константном
моментном
карактеристиком.
Поред
већ
наведених, за
реализацију
решења у овој
вежби корите
се следећа
подешавања.
Мени
FUn,
подмени rPC
|
Параметар |
Вредност |
Опис |
|
Frt |
15 |
Промена
рампе услед
прекорачења |
|
rPt |
LIn |
Избор
типа рампе |
Мени
SEt
|
Параметар |
Вредност |
Опис |
|
ACC |
20 |
Обезбеђује
„мекан“
полазак
лифта како
би се умањио
осећај
„полетања“ |
|
AC2 |
10 |
Обезбеђује
довољно
убрзање да
залетање не
би трајало
предуго |
|
dE2 |
5 |
Обезбеђује
довољно
успорење да
заустављање
не би
трајало
предуго |
|
dEC |
8 |
Обезбеђује
„мекано“
заустављање
лифта како
би се умањио
осећај
„пропадања“ |
|
LSP |
0 |
Брзина
обртања
мотора при
минималној
референци |
|
HSP |
45 |
Брзина
обртања
мотора при
максималној
референци |
Како
би на дисплеју
претварача
могла да се
прати
вредност
фреквенције
која се
доводи на
мотор,
потребно је у
менију SUP
активирати
функцију rFr.
Снимање
облика
задате рампе
помоћу
енкодера и
аквизиционе
картице
Да
би се уочио
облик рампе
убрзања и
успорења
потребно је
извршити
снимање
брзине обртања
помоћу енкодера,
аквизиционе
картице и
програмског
пакета LabVIEW.
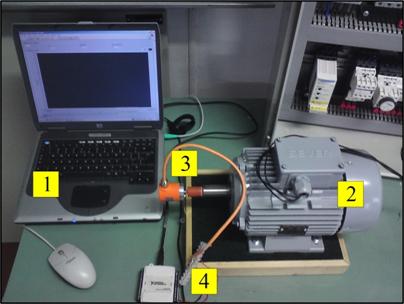
Енкодер чија
је осовина
директно
спрегнута на
осовину
асинхроног
мотора (слика
3.5) даје
информацију
о брзини у
виду импулса.
Ови импулси
се доводе на
брзи
бројачки
улаз PFI0 аквизиционе
картице NI USB-6009.
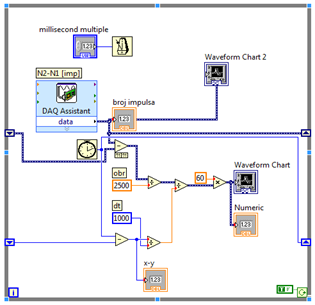
Помоћу
програма LabVIEW и
фајла merenje brzine.vi је
омогућено да
се на графику
уочи промена
брзине у
времену.
Изглед блок
дијаграма
који се
користи за
мерење
брзине
обртања је
дат на слици 3.6.
|
Слика
3.5.
Апаратура
која се
користи за
снимање
облика
рампе: (1)
рачунар; (2)
асинхрони
мотор; (3) енкодер;
(4)
аквизициона
картица. |
Слика
3.6. Блок
дијаграм за
мерење
брзине
обртања реализована
у
програмском
пакету LabVIEW |
Линк
ка видео
запису: https://picasaweb.google.com/lh/photo/cvNquU33-t8GgmpWf_7hAdMTjNZETYmyPJy0liipFm0?feat=directlink
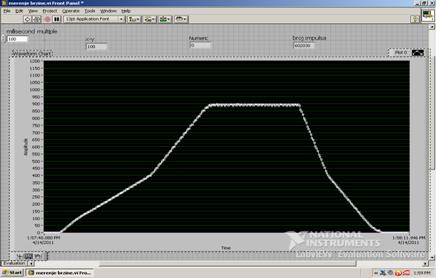
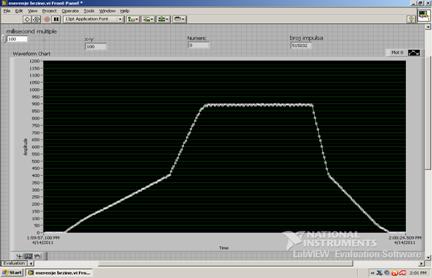
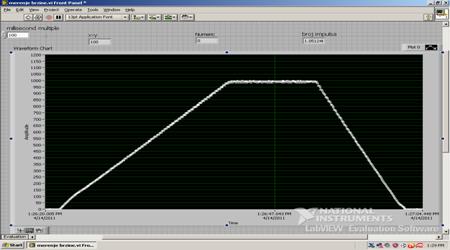
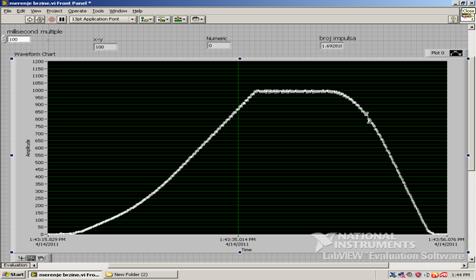
На
сликама 3.7а и 3.7б
приказана је
промена брзине
при
стартовању и
заустављању
мотора са две
рампе при
различитим
параметрима.
Примери који
су приказани
су добијени
при следећим
подешавањима:
|
||||||||||||||||||||||||
|
Слика
3.7а. Рампе при
параметрима
ACC=20; AC2=10; dE2=5; dEC=10; LSP=0 и HSP=45 |
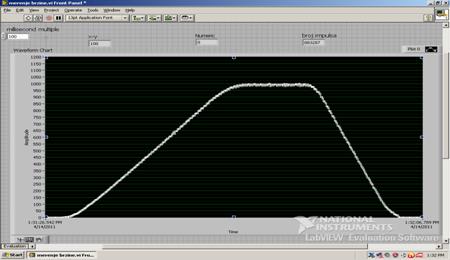
Слика
3.7б. Рампе при
параметрима
ACC=20; AC2=5; dE2=2,5; dEC=10; LSP=0 и HSP=45 |
|||||||||||||||||||||||
Поступак
рада:
1.
Проверити
да ли је
главни
прекидач у
ормару
искључен, а
затим
приступити
повезивању;
2. Повезати
уређај, преко
неке од
заштита, на напајање;
3. Повезати
мотор на
уређај;
4. Повезати
потребне
управљачке
улазе (логичке
и/или
аналогне);
5.
Када је све
повезано
укључити
прекидач, чиме
се укључује и
уређај (у
случају да је
све исправно
повезано на дисплеју
је приказано rdY);
6.
Подесити
параметре
мотора у drC- менију;
7.
Подесити
потребне
параметре у
менијима FUn-, SEt-,SUP;
8.
Покренути
мотор. Након
достизања
стационарне
брзине
зауставити
мотор;
9. Променити
смер обртања
и поновити
поступак;
10. Покренути
апликацију merenje brzine.vi у
програму LabVIEW и
снимити
брзину
обртања
преко
енкодера и аквизиционе
картице.
Уочити
облике рампи залета
и
заустављања.
Вежба 5б. -
Упознавање
са осталим
типовима рампи.
Опис
вежбе
Код
мотора чије
је
стартовање и
заустављање
реализовано
линеарном
рампом,
велико
почетно убрзање
(мала
вредност за ACC) може
за последицу
имати велики
трзај у тренутку
поласка (као
и у сваком
тренутку
промене
убрзања). С
друге стране,
уколико
убрзање није
довољно
велико, време
трајања
залета
мотора може
трајати дуго.
Један
од начина да
се реши овај
проблем је употреба
комбинације
две
различите
линеарне
рампе
убрзања
(успорења),
што је
урађено у
претходном
делу вежбе.
Међутим,
фреквентни претварач
нам пружа
могућност
коришћења и
осталих типова
рампи.
|
S –
рампа
|
U –
рампа
|
CUS - рампа
|
Одабир
ових рампи се
врши на већ
поменути начин,
у менију FUn,
подмени rPC,
параметар rPt. S-рампа
и U-рампа
су фабрички
подешене и не
могу се додатно
подешавати.
Активирањем
произвољне CUS-рампе,
у менију FUn,
подмени rPC,
постају
доступни
параметри
наведени у следећој
табели.
|
Параметар |
Опис |
Опсег
подешавања |
Фабричко
подешење |
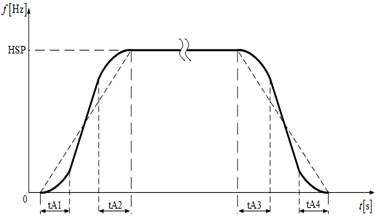
|
tА1 |
Трајање
почетка
произвољне
рампе
убрзања узето
као
проценат од
укупног
времена трајања
рампе |
0
до
100 |
10 % |
|
tА2 |
Трајање
краја
произвољне
рампе
убрзања узето
као
проценат од
укупног
времена
трајања
рампе |
0
до (100- tA1) |
10 % |
|
tА3 |
Трајање
почетка
произвољне
рампе
заустављања
узето као
проценат од
укупног
времена
трајања рампе |
0
до
100 |
10 % |
|
tА4 |
Трајање
краја
произвољне
рампе
заустављања
узето као
проценат од
укупног
времена трајања
рампе |
0
до (100- tA3) |
10 % |
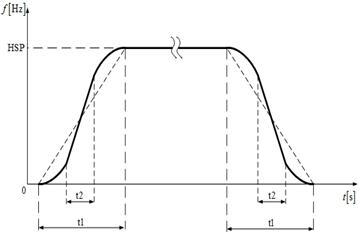
Комбиновањем
ових параметара
може се
добити
жељени облик S-рампе
како при
поласку тако
и при
заустављању,
који не
морају бити
исти. Такође
се може
добити и U-рампа,
тако што се
један од
парамтара tА1
или tА2
(односно tА3
или tА4)
подеси на 0%.
И у
овом случају
корисно је
извршити
снимање
брзине, како
би проверили
да ли фреквентни
претварач
заиста врши
залетање и
заустављање
мотора преко
одабраног
типа рампе.
Поступак снимања
облика рампи
се врши на
исти начин
као што је
описано у
вежби 3а.
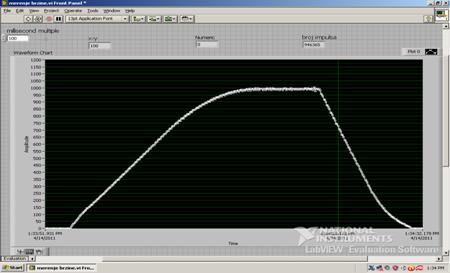
На
сликама 3.8а-3.8д
приказани су
облици рампи
добијени
снимањем у
програмском
пакету LabVIEW за подешења
параметара LSP=0, HSP=50, ACC=20 и dEC=10.

|
Слика
3.8а. Линеарна (LIN)
рампа |
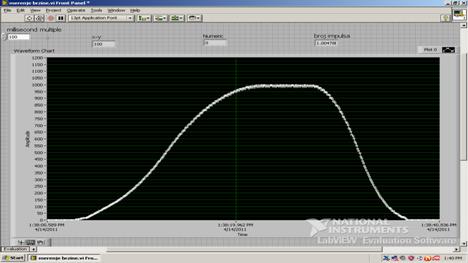
Слика
3.8б.
S-рампа |
|
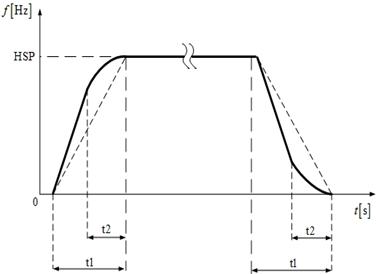
Слика
3.8в. U-рампа |
Слика 3.8г. CUS-рампа
за
параметре tА1=50, tA2=50, tA3=50, tA4=50 |
|
Слика 3.8д. CUS-рампа
за
параметре tА1=60, tA2=0, tA3=60, tA4=0 |
|
Поступак
рада:
1.
Активирти S-рампу
у
одговарајућем
менију.
2.
Покренути
мотор и на дисплеју
претварача
посматрати
начин на који
се мења
фреквенција.
3.
Уочити
разлику
између
промене
фреквенције
при S-рампи
и LIn-рампи.
4.
Зауставити
мотор и
пратити
начин
промене фреквенције
током
заустављања.
5.
Поновити
поступак за U-рампу.
6.
Активирати
CUS-рампу
и извршити
подешавања
одговарајућих
параметара.
Поновити
поступак.
7. Покренути
апликацију merenje brzine.vi у
програму LabVIEW и и
за различите
типове рампи
снимити брзину
обртања
преко
енкодера и
аквизиционе
картице.
Уочити
облике рампи
залета и
заустављања;
8.
Искључити претварач
и мотор са
мреже.