Sadržaj:
Demonstracija osnovnih funkcija upravljanja AC servo
motorom
·
Zadatak
Demonstracija osnovnih funkcija upravljanja
AC servo motorom
Zadatak
Podesiti servo kontroler prema zahtevima pogona, kako bi se izvršilo upravljanje po poziciji, brzini i momentu.
Uputstvo za rad
|
1.
Priprema servo kontrolera -
Uključiti
prekidač za napajanje komandnog ormana. -
Postaviti
glavni grebenasti prekidač S1 u položaj jedan. -
Pritisnuti
taster START za dovođenje kontaktora u provodno stanje, čiji
kontakti uključuju napajanje servo kontrolera na konektoru CN1 i
napajanje kontrolera sa 24 V jednosmernog napona na konektoru CN2 radi
ostvarivanje funkcije STO. Kontaktor je povezan u samodržećem spoju,
tako da i nakon otpuštanja tastera START, špulna kontaktora se napaja preko
radnog kontakta i obezbeđuje radni režim kontaktora. Prekidanje radnog režima
i držanja kotvi kontaktora je pritiskom na taster STOP. - Status servo kontrolera biće
prikazan na integrisanom HMI interfejsu, i ako ne postoje greške na displeju
će biti ispisan status Ready. Izgled displeja na uređaju je
prikazan na slici 2. |
Sl. 1 |

Sl. 2
- Pokrenuti program SoMove na
računaru, uz uslov da je ostvarena komunikaciona veza između računara i servo
kontrolera kako je prikazano u šemi veze preko modbus
protokola. Nakon starta programa na početnom
prozoru izabrati opciju Connect, kako bi uspostavila veza između računara i servo kontrolera.
Svi parametri koju su u uređaju
mogu se sada pregledati i menjati u zavisnosti od
potrebe.
- Pritisnuti dugme ON najpre u delu Excl. zatim i u delu Power radnog prozora. Time će
se omogućiti rad uređaja,
u odeljku Operating
state biće označeno
POWER ENABLED, znači da je uključeno
napajanje uređaja.
Režim rada po poziciji
Zadatak:
Podesiti servo kontroler da izvrši pozicioniranje osovine motora prema sledećim
zahtevima pogona, izvršiti pomeranje osovine za jedan
obrtaj odnosno za ugao 360° pri
brzini od 5 min-1 a nakon
toga još jedan pomeraj za ugao
od 360° ali pri brzini od 20 min-1.
Podešenja za radni
režim pozicioniranja za upravljanje pozicijom motora, prikazana su na slici 3. U polju Operating modes izabrati poziciju (Profile Position), u polju
Target position zadaje
se tražena pozicija osovine motora. Pozicija je izražena u broju tačaka. Korisnički definisana jedinica
za poziciju (usr_p) predstavlja broj tačaka za koji treba
da se pomeri osovina motora. Polje Speed služi za zadavanje
brzine postizanja zadate pozicije. Korisnički definisana jedinica za brzinu (usr_v)
predstavlja broj obrtaja u minutu.
U poljima Max.Acc i Max.Decel zadaje
se maksimalna vrednost ubrzanja i usporenja.

Sl. 3
Poziciono skaliranje je odnos između broja obrtaja motora i zahtevane korisnički definisane jedinice (usr_p).
Faktor pozicionog skaliranja je prikazan sledećom jednačinom:

Faktor skaliranja je podešen parametrima ScalePOSnum i ScalePOSdenom. Fabričko podešenje je 1 obrtaj
motora odgovara 16384 korisničkih jedinica.
Korisnički definisana jedinica se može kretati u opsegu od 1 do 2147483647, i mora biti ceo broj.
U ovom slučaju je podešena na
100000.
Dakle pošto je u zadatku postavljen zahtev da se izvrši jedan obrtaj, u polju Target position
zadaje se:

Za brzinu se u polju Speed zadaje 5 min-1 a onda 20 min-1. U poljima
Max.Acc i Max.Decel zadaje se 600 korisnički definisanih jedinica, što odgovara ubrzanju
od 10 1/s2.
|
Kada je sve to podešeno pritisnuti
dugme Start u odeljku Proceed, za
pozicioniranje sa prvom brzinom, a nakon toga upisati drugu brzinu i opet
pritisnuti dugme start. Time će uređaj izvršiti zadati radni režim,
uz poštovanje predhodnih zadatih parametara. Na integrisanom displeju servo
kontrolera, biće prikazana statusna poruka Run. |
|
|
|
Sl.
4 |
Motor
treba da izvrši pomeranje vratila jedan puni krug
(znači 360°) pri prvoj brzini i da se zaustavi, a zatim još jedan krug
pri drugoj brzini. Grafik pozicioniranja snimiti uz pomoć funkcije
Scope, na sledeći način:
U
tabu Scope odabrati parametar koji treba snimiti,
klikom na
znak plus u odeljku Channels, otvara
se prozor za dodavanje parametra kanala 1 osciloskopa, u njemu izabrati parametar Actual position in internal units.
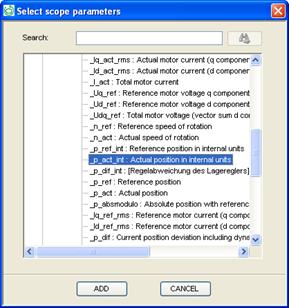
Sl. 5
Za vrednost Sampling rate upisati vrednost
100 ms. U polju Triggers izabrati iz padajućeg
menija Standard, a za Mode postaviti
Auto. Grafik pozicioniranja
snimljen uz pomoć funkcije Scope prikazan
je na sledećoj
slici. Na grafiku
se jasno vidi da je u prvom delu postavljena
manja brzina postizanja zadatog položaja (veći nagib) a u drugom delu je postavljena veća brzina (manji nagib).
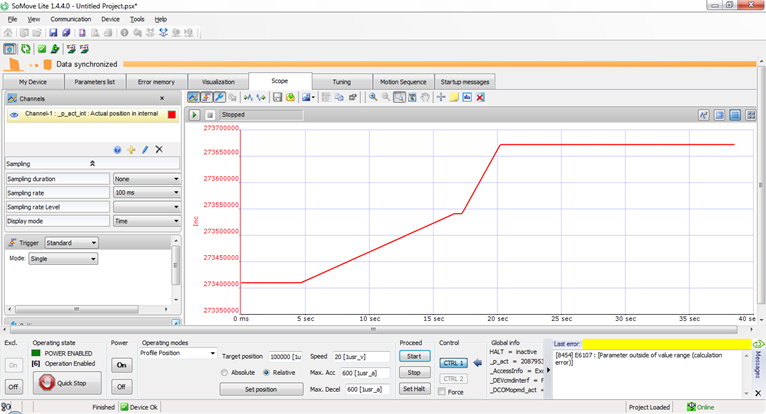
Sl. 6
U
slučaju da motor nije tačno izvršio ovu operaciju, proveriti podešenja za Scaling/ScalePOSdenom, čija vrednost treba da bude 100000.
Isprobati promenu smera zadavanjem vrednosti pozicije sa negativnim
predznakom.
Slika sa linkom ka video fajlu demonstrira režim rada po poziciji
Režim rada po brzini
Zadatak:
Podesiti servo kontroler prema sledećim zahtevima elektromotornog pogona: referentna brzina obrtanja vratila motora treba da bude 300 min-1, vreme polaska odnosno vreme za koje
je potrebno da motor postigne
zadatu brzinu je 5s, a vreme usporenja odnosno vreme za
koje treba da brzina motora bude
nula, treba da bude 2,5s. Režim rada pogona prikazan je sledećim dijagramom.
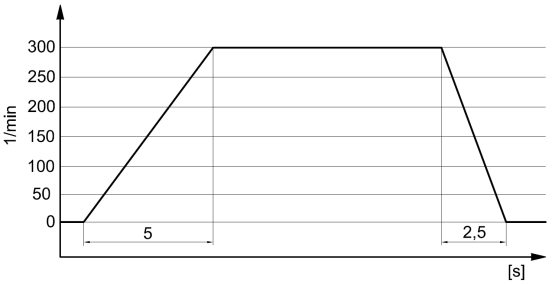
Sl. 7

Sl. 8
Za radni režim u polju
Operating modes izabrati
iz padajućeg menija profil brzine
(Profile Velocity). Pri zadavanju vrednosti
željene brzine treba voditi računa
o maksimalno dozvoljenoj brzini upotrebljenog AC sinhronog servo motora, u ovom slučaju je maksimalna brzina 9000 min-1.
Ali iz sigurnosnih razloga treba se držati nominalne vrednosi za brzinu
od 8000 min-1.
U polju Target speed, upisati vrednost
željene brzine. U poljima Max.Acc i Max.Decel zadaje
se maksimalna vrednost ubrzanja i usporenja.
Faktor brzinskog skaliranja je prikazan sledećom jednačinom:
![]()
Faktor skaliranja je podešen parametrima ScaleVELnum i ScaleVELdenom. Fabričko podešenje je 1 obrtaj
motora u minutu odgovara 1 korisnički definisanoj jedinici. Korisnički definisana jedinica se može kretati u opsegu od 1 do 2147483647, i mora biti ceo broj.
U ovom slučaju je postavljena na
jedinicu.
Dakle, pošto je u zadatku postavljen zahtev da se izvrši upravljanje po brzini, u polju Target speed zadaje
se referentna brzina iz postavke zadatka,
što iznosi 300 min-1
jer je faktor skaliranja jedan.
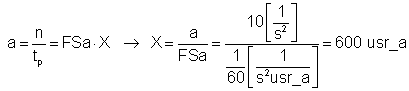
Faktor skaliranja za ubrzanje je prikazan sledećom jednačinom:

Prema zahtevu zadatka vreme postizanja referentne brzine dato je i iznosi 5s, dok je vreme usporenja
2,5s. Način proračuna
vrednosti korisnički definisane jedinice (koja se unosi u program) za ubrzanje i usporenje
(Max.Acc i Max.Decel):

U
poljima Max.Acc i Max.Decel zadaje se 60 i 120, respektivno, korisnički definisanih jedinica, što odgovara ubrzanju
od 1 1/s2, odnosno
2 1/s2.
Kada je sve to podešeno pritisnuti dugme Start u odeljku Proceed.
Time će uređaj izvršiti zadati radni režim,
uz poštovanje predhodnih zadatih parametara. Na integrisanom
displeju servo kontrolera, biće prikazana statusna poruka Run.
Vratilo motora bi trebalo da se okreće zadatom brzinom od 300 min-1.
Proveriti tačnost sistema upravljanja brzinom, merenjem ostvarene brzine na vratilu
motora. Ukoliko izmerena vrednost brzine značajno odstupa od
zadate vrednosti, potrebno je proveriti podešenja u odeljku Scaling.
Grafik brzine snimiti
uz pomoć funkcije Scope, na sledeći
način:
U
tabu Scope odabrati parametar koji treba snimiti,
klikom na
znak plus u odeljku Channels, otvara
se prozor za dodavanje parametra kanala 1 osciloskopa, u njemu izabrati parametar Actual speed of rotation.
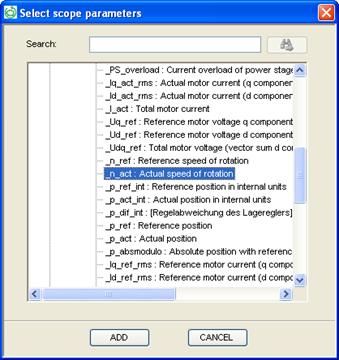
Sl. 9
Za vrednost Sampling rate upisati vrednost
100 ms. U polju Triggers izabrati iz padajućeg
menija Standard, a za Mode postaviti
Single. Grafik pozicioniranja
snimljen uz pomoć funkcije Scope prikazan
je na sledećoj
slici.
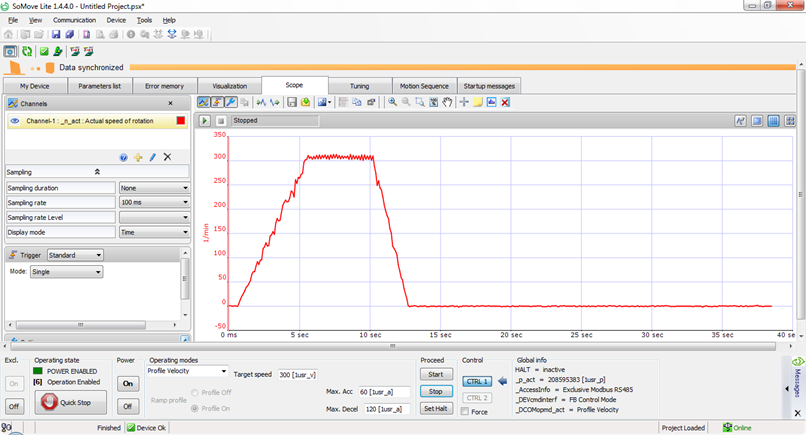
Sl. 10
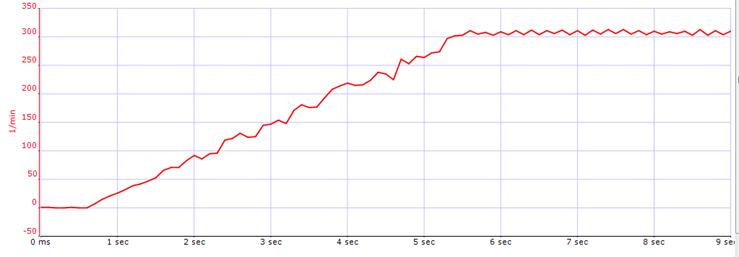
Sl. 11 Uzlazna rampa brzine
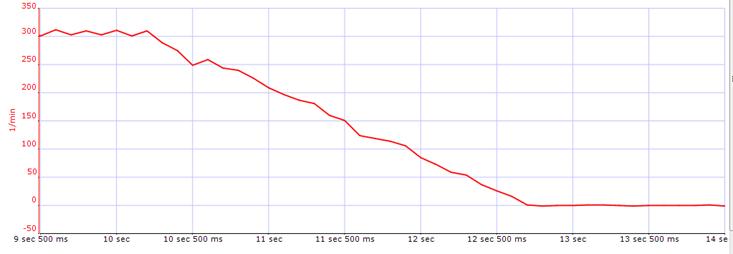
Sl. 12 Silazna rampa brzine
Na
datim graficima može se izmeriti vreme polaska i kočenja i uporediti sa podešenim
vrednostima. Isprobati promenu smera zadavanjem
vrednosti brzine sa negativnim
predznakom.
Slika sa linkom ka video fajlu demonstrira režim rada po brzini
Režim rada po momentu
Zadatak:
Podesiti servo kontroler prema sledećim zahtevima elektromotornog pogona:
Referentna vrednost momenta treba da iznosi 2,25 Ncm
a ubrzanja 10 1/s2. Prikazati
na osciloskopu
trenutnu vrednost momenta korišćenjem funkcije Scope u
programu SoMove.
Za radni režim u polju
Operating modes izabrati
iz padajućeg menija profil momenta (Profile
Torque).
U
polju Current
value, upisati vrednost
željenog momenta u procentima
(0-100% od nominalnog momenta). U poljima Max.Acc i Max.Decel zadaje se maksimalna vrednost ubrzanja i usporenja.

Sl. 13
Napomena: Prilikom zadavanja vrednosti momenta voditi računa o sledećem: zbog radnih uslova
u laboratoriji i nepostojanja
opterećenja na osovini motora, razvija se moment samo na savlađivanje sopstvenog momenta usled trenja koji je mali i iznosi oko
1,5% od nominalnog
momenta (0,675 Ncm), za ![]() . Tako da motor ne bi ubrzavao do maksimalnih vrednosti, procentualna vrednost koju ne
treba prelaziti u ovom režimu je 5%.
. Tako da motor ne bi ubrzavao do maksimalnih vrednosti, procentualna vrednost koju ne
treba prelaziti u ovom režimu je 5%.
Za datu vrednost
momenta sračunati vrednost
u procentima koju treba zadati u programu, prema sledećoj formuli:
![]()
Grafik momenta snimiti uz pomoć funkcije
Scope, na sledeći način:
U
tabu Scope odabrati parametar koji treba snimiti,
klikom na
znak plus u odeljku Channels, otvara
se prozor za dodavanje parametra kanala 1 osciloskopa, u njemu izabrati parametar Actual torque value.
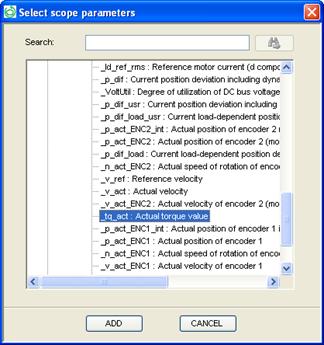
Sl. 14
Za vrednost Sampling rate upisati vrednost
10 ms. U polju Triggers izabrati
iz padajućeg menija Standard, a za Mode postaviti
Auto. Grafik momenta snimljen
uz pomoć funkcije Scope prikazan je na
sledećoj slici.
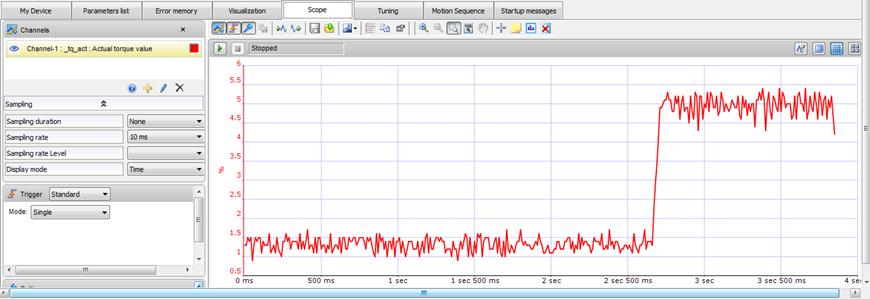
Sl. 15
Na
grafiku se može videti da u početku motor razvija moment na savlađivanje sopstvenog
momenta usled inercije, koji na grafiku
iznosi oko 1,25 %, dok zadati
moment oko 5 %. Tačnost
prikaza na
grafiku zavisi od vremena uzorkovanja
(sampling rate).
Po stopiranju radnog
režima, potrebno je isključiti napajanje u programu. Pritisnuti dugme Off najpre
u delu Power zatim i u delu Excl. radnog prozora. Time će
se omogućiti bezbedna diskonekcija uređaja, klikom na opciju
Disconnect from Device iz padajućeg menija Communication.
Mogu se snimiti trenutna podešenja na računar
u vidu projekta, koji se može kasnije
otvoriti u Offline režimu ili učitati u neki drugi kompatibilan
uređaj.
Nakon toga može se bezbedno izaći iz radnog
okruženja programa SoMove.
Slika sa linkom
ka video fajlu demonstrira režim rada po momentu