Konfigurisanje
uređaja u programu SoMove
·
Zadatak
·
Kreiranje projekta u offline modu
·
Kreiranje projekta u online modu
·
Podešavanje regulatora po brzini i poziciji
(odziv sistema)
Konfigurisanje
uređaja u programu SoMove
Zadatak
Kreirati projekte u offline i online modu,
u programu SoMove. Prikazati odziv regulatora za upravljanje po brzini i poziciji,
primenom opcije Expert tuning.
SoMove, softver
za rad u windows okruženju,
omogućava sledeće
aktivnosti na
samom uređaju:
-
Povezivanje,
-
Učitavanje podataka sa uređaja,
-
Unos podataka na uređaj,
-
Testiranje povezanosti,
-
Unošenje i iznosenje podataka preko multi-loader-a.
Kreiranje
projekta u offline modu
Moguće je za konkretni uređaj
kreirati projekat odnosno podešenja, bez predhodnog povezivanja sa
samim uređajem.
SoMove omogućava kreiranje konfiguracionog fajla za unapred određeni
uređaj bez povezivanja sa
njim, i snimanje tog fajla za
kasniju upotrebu.
Da bi se kreirao
projekat u offline modu potrebno je selektovati tip uređaja, definisati njegove karakteristike i parametre podešavanja, i na kraju
projekat snimiti na računaru. Kasnije takav konfiguracioni
fajl moguće je prebaciti na
uređaj.
Da bi se pristupilo
ovoj funkciji potrebno je kliknuti na početnoj
strani na dugme „Create a Project OFF-line” ![]()
1.
Selektovati
tip uređaja u dialog boksu,
prikazanom na
sledećoj slici.
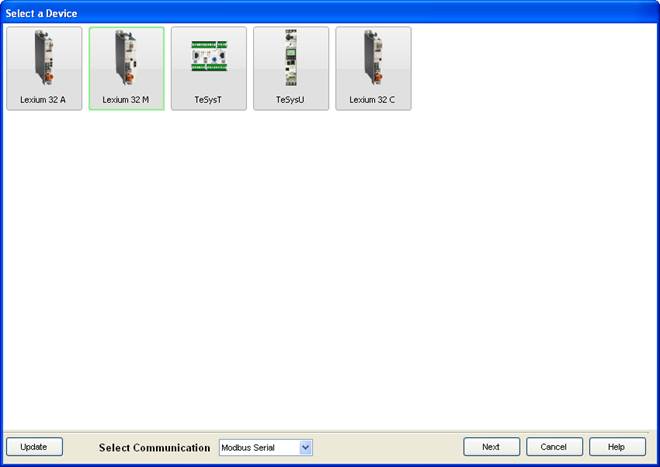
Sl. 1
2.
Zatim
definisati karakteristike uređaja, podesiti u „Topology settings“ referencu i verziju firmware-a
prema sledećoj slici. Druge karakteristike
uređaja koje zavise od
reference bivaju automatski
prikazane u odgovarajuća
polja (supply
voltage, nominal power, nominal current i maximum transient current). Klikom na dugme „OK“ potvrđuje se postavljeni
izbor. Rezultat toga je da
tab „Parameters“ biva prikazan u prozoru radnog okružena.
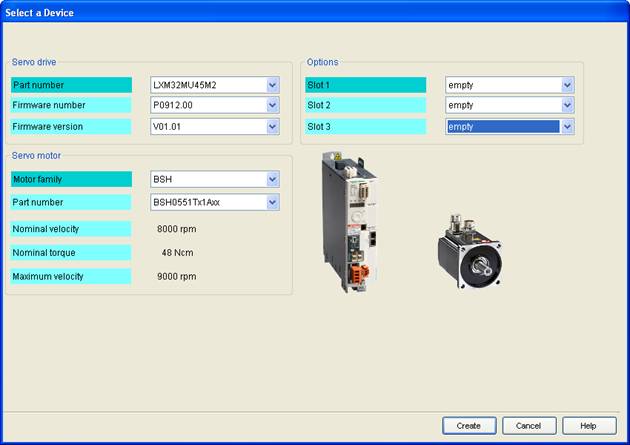
Sl. 2
3.
Klikom
na dugme
Create, otvara
se glavni prozor sa raspoređenim funkcijama za postavljanje
parametara, monitoring i upravljanje,
u okviru Tab-ova. U tabu My
Device može se videti izabrani uređaj sa osnovnim
karakteristikama.
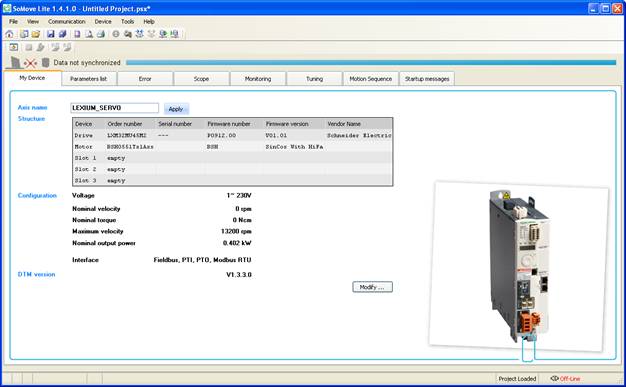
Sl. 3
4.
Podešavanje
parametara modifikovanjem trenutnih vrednosti u koloni „Value” u
tab-u “Parameters list”, prikazano je na
sledećoj slici.
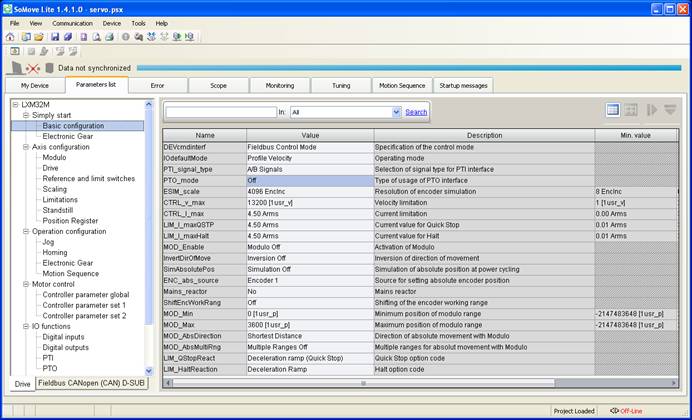
Sl. 5
5.
Nakon
izvršenih podešenja, pristupiti snimanju projekta klikom na dugme „Save As“ u tool bar-u
U prozoru Save As, odrediti mesto gde će se snimiti projekat i upisati ime projekta, i sve to potvrditi klikom na dugme
„Save“.
6.
Prenošenje
konfiguracionog fajla na uređaj, realizuje se u radnom okruženju programa, klikom na dugme
„Store to Device“ u
tool bar-u. U posebnom prozoru
biće prikazan napredak prenošenja fajla ka uređaju,
koji je potrebno da sada bude priključen
na računar.
Na kraju prenosa konfiguracionog fajla biće prikazana poruka obaveštenja o uspešnosti procesa.
Sl. 6
Postojeći projekat, odnosno konfiguracioni fajl koji je predhodno
sačuvan na
računaru, može se jednostavno menjati i prilagođavati parametre podešenja prema novim zahtevima i uslovima za upravljani
uređaj u pogonu.
Kreiranje projekta u online modu
Kada je ostvarena komunikacija računara sa
servo kontrolerom, moguće
je podešavati, menjati parametre i upravljati uređajem bez prekidanja veze (online).
Postupak je sledeći. Nakon ostvarivanja komunikacione veze računara sa
servo kontrolerom, pokrenuti
program SoMove i na početnom prozoru izabrati opciju Connect, kojom
se vrši povezivanje sa uređajem. Nakon toga pojaviće se glavni prozor u kome su
sve funkcije, podešavanja i monitoring organizovane
u više Tab-ova.
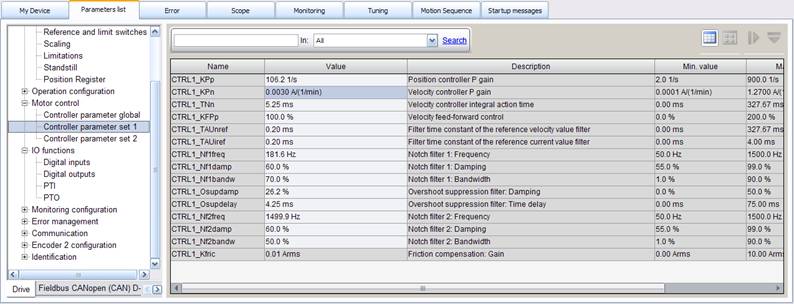
U tabu My Device su prikazani osnovni podaci o izabranom uređaju. U tabu Parameters list organizovani
su razni parametri za podešavanje
servo kontrolera. Najpre je
potrebno podesiti jedinice skaliranja u zavisnosti od korišćenog
motora i enkodera, kako bi se postigla što veća tačnost.
Postaviti vrednosti parametara prema sledećoj slici.
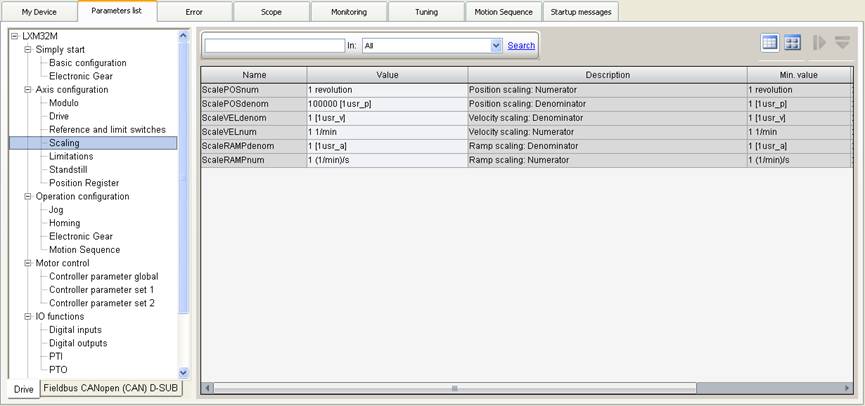
Sl. 7
Postavljena vrednost 100000 pozicionog skaliranja: denominator (imenilac),
predstavlja referencu kojom uređaj proračunava broj tačaka po jednom obrtaju, a tako je i definisana ukupna moguća rezolucija pomeraja. Praktično
to znači da kod radnog režima pozicioniranja,
za jedan pun krug odnosno za
obrtaj osovine motora za 360°, treba se zadati vrednost 100000. Po toj analogiji za pomeraj
od 180° treba zadati vrednost 50000 itd. Sve ostale
jedinice, za brzinu i ubrzanje, se baziraju na
ovu zadatu rezoluciju koja u programu može da iznosi mnogo više
od rezolucije enkodera.
Sledeće je
potrebno definisati logiku graničnih prekidača LIMP i LIMN, da bi bila
u saglasnosti sa
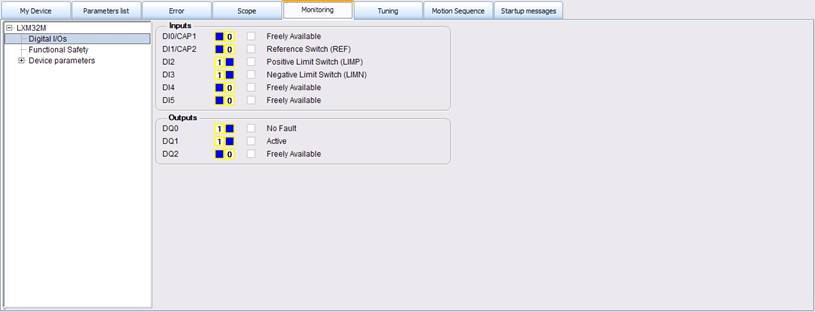
ožičenjem na konektoru CN6, za slučaj da je na digitalni ulazima postavljena ova mogućnost. Naime najpre proveravamo
da li su parametri digitalnih ulaza kao na slici 3.18. Digitalni ulazi DI2 i DI3 su podešeni kao pozitivni
i negativni granični prekidači, tako da je potrebno postaviti logiku dali
su normalno otvoreni ili zatvoreni.
Usled postojanja razlike između postavljenih parametara i povezivanja, može se desiti da servo kontroler ne startuje.
Potrebno je isprobati kombinaciju ovih funkcija sa hardverskim povezivanjem.
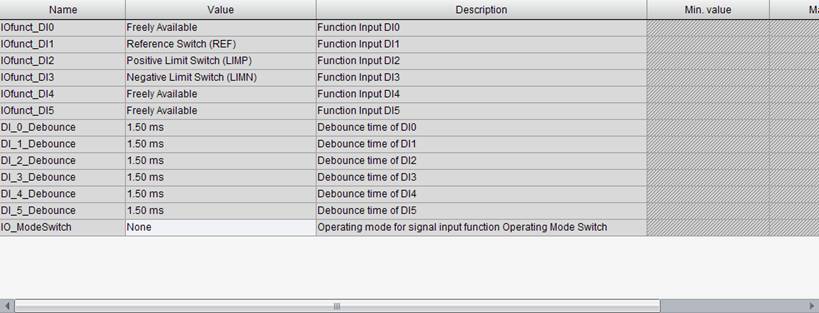
Sl. 8 Digitalni ulazi DI2 i DI3 kao granični prekidači

Sl. 9 Granični
prekidači – normalno zatvoreni

Sl. 10 Granični
prekidači – normalno otvoreni
U tabu Error moguć
je pregled grešaka koji su se desile
u sistemu po hronološkom redu. Na sledećoj slici je prikazana struktura prikaza grešaka sa primerom
poslednje greške odnosno greška sa oznakom E1300 što u opisu znači
da je aktivirana sigurnosna
fukcija STO odnosno da je pritisnut taster EMERGENCY STOP.
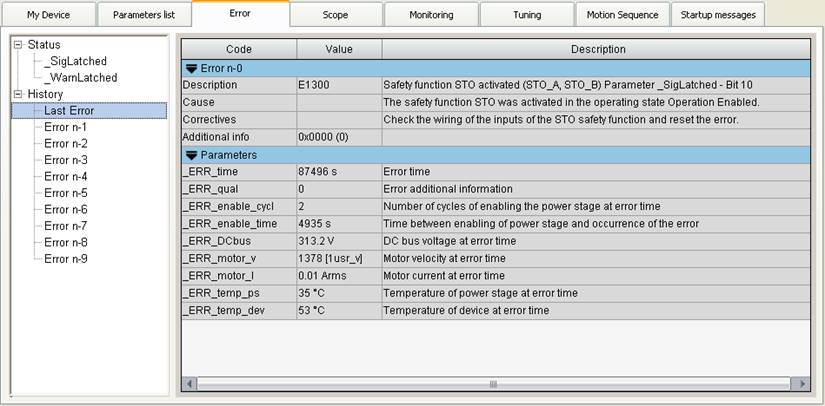
Sl. 11 Error tab
U tabu Scope je predstavljena
funkcija osciloskopa u programu SoMove, sa namenom
za vizuelno praćenje odgovarajućih veličina motora. Na sledećoj slici je prikazana primena funkcije osciloskopa za prikaz trenutne
brzine obrtanja motora pri radnom
modu brzine od 500 min-1, i vremenom
uzorkovanja od 100ms.
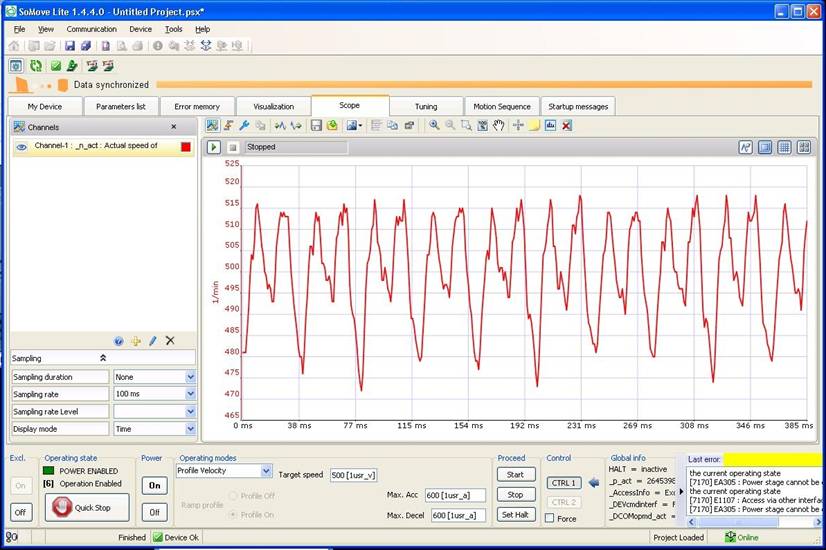
Sl. 12 Osciloskop
U tabu
Monitoring može
se pregledati trenutno stanje digitalnih ulaza i izlaza i status sigurnosne funkcije STO.
Sl. 13 Monitoring
Podešavanje regulatora po brzini i poziciji (odziv
sistema)
U tabu Tuning postoje
tri načina za podešavanje kontrolnih petlji sistema.
-
Easy Tuning: Automatsko
podešavanje bez intervencije korisnika,
-
Comfort Tuning: Poluautomatsko
podešavanje sa
delimičnim podešenjima
korisnika, koji može podesiti parametre
za smer i kočenje.
-
Manual (Expert mode): Korisnik
može da podešava parametre kontrolnih petlji.
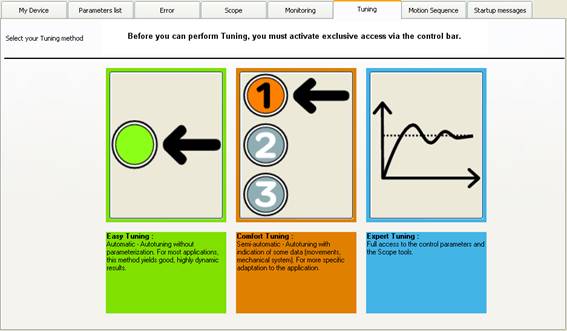
Sl. 14 Tuning
Autotuning određuje moment trenja,
kao da je konstantan moment
opterećenja, i uzima ga u obzir pri
proračinu momenta inercije
celokupnog sistema. Autotuning optimizuje podešenja parametra kontrolne petlje. Tokom autotuning-a motor je aktivan i pravi male pomeraje. Primetne su mehaničke
oscilacije.
Za optimizaciju kontrolera,
treba izabrati mod Expert Tuning. Najpre pratiti odziv brzinske petlje, zadavanjem sledećih parametara:
-
Operating mode: izabrati iz padajućeg menija Manual tuning/Autotuning,
-
Type: izabrati Square to speed controller, jer se prati odziv brzinske
petlje,
-
Signal: izabrati Symetric rectangle (default), za pravougaoni
referentni signal,
-
Size: upisati brzinu
za koju se snima odziv sistema,
1000 min-1,
-
Period: upisati trajanje signala u milisekundama, 100 ms,
-
Count: upisati 1 za broj ponavljanja.
Nakon izbora opcije u polju Type, automatski se pojavljuju veličine koje se prate na osciloskopu
u polju Channels,
kao i podešenja osciloskopa.
Kada je sve podešeno, pokrenuti
autotuning na
dugme Start.
Dobija se sledeći grafik odziva po brzini.
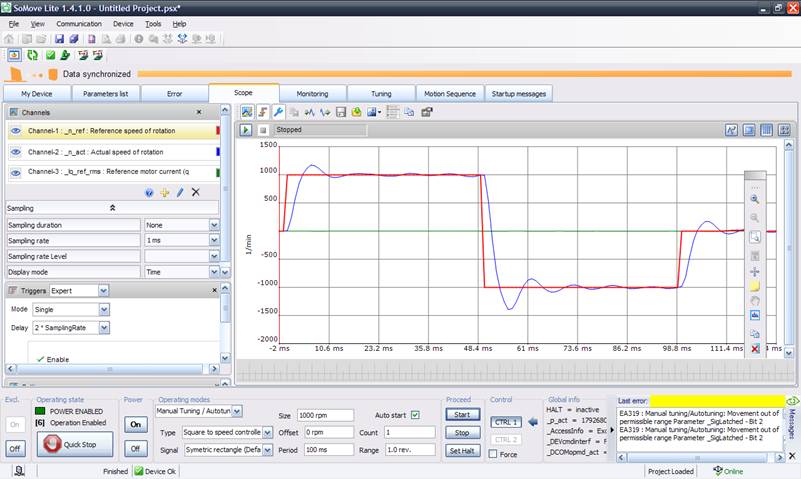
Sl. 15 Tuning brzinske petlje
Za optimizaciju pozicione petlje, uraditi odziv sistema, zadavanjem sledećih parametara u modu Expert Tuning:
-
Operating mode: izabrati iz padajućeg menija Manual tuning/Autotuning,
-
Type: izabrati Square to position controller, jer se prati odziv pozicione
petlje,
-
Signal: izabrati Positive rectangle, za
pozitivni pravougaoni referentni signal,
-
Size: upisati poziciju
za koju se snima odziv sistema,
pomeraj za ugao 3,6° odnosno 1000 usr,
-
Period: upisati trajanje signala u milisekundama, 100 ms,
-
Count: upisati 1 za broj ponavljanja.
Nakon izbora opcije u polju Type, automatski se pojavljuju veličine koje se prate na osciloskopu
u polju Channels,
kao i podešenja osciloskopa.
Kada je sve podešeno, pokrenuti
autotuning na
dugme Start.
Dobija se sledeći grafik odziva sistema po poziciji.
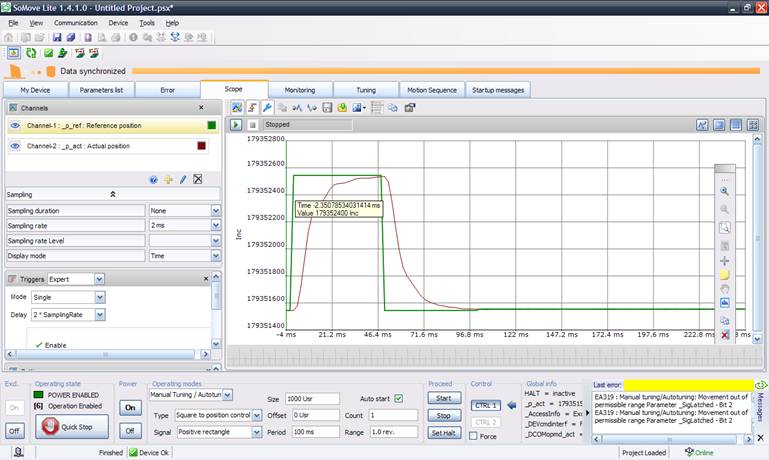
Sl. 16 Tuning pozicione petlje
Na osnovu
snimljenih odziva sistema, mogu se vršiti dodatna podešavanja PID parametara regulatora, prema zahtevima servo pogona. Na
primer, ako je potrebno povećati brzinu postizanja referentne veličine, potrebno je povećati vrednost parametra P (pojačanje), kako je prikazano na sledećoj
slici.
Sl. 17 Podešavanje
PID parametara regulatora