8.6 ЛАБОРАТОРИЈСКА ВЕЖБА 6
Задатак вежбе: PI регулација брзине струјно управљаним микромотором једносмерне струје
Увод
Simulink моделовање
Да
би се добила
упрошћена
структура
регулације- управљања
у затвореној
повратној
спрези,
потребно је
прво
извршити упрошћење
модела
управљања у
отвореној повратној
спрези. Ако
се улазна
променљива
задаје као
референтна
брзина
мотора ![]() ,
мора се
додати блок
коефицијента
појачања
,
мора се
додати блок
коефицијента
појачања ![]() који
представља
константу
превођења
референтне
брзине
који
представља
константу
превођења
референтне
брзине ![]() , у
управљачки
напон
, у
управљачки
напон ![]() .
.

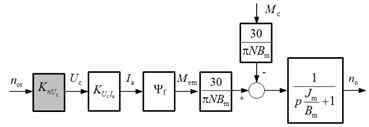
Сл.
8.32
Уопштена
шема
управљана
мотором у
отвореној
повратној
вези са
константом
превођења
референтне
брзине ![]() , у
управљачки
напон,
, у
управљачки
напон, ![]() .
.
Ова
константа се
може
одредити на
основу захтева
да брзина на
излазу у
стационарном
стању ![]() ,
буде једнака
са задатом
брзином
,
буде једнака
са задатом
брзином ![]() ,
када се
занемари
дејство
поремећаја.
Према томе кад
,
када се
занемари
дејство
поремећаја.
Према томе кад
![]() мора
да важи:
мора
да важи:
![]() , тј.
, тј.
![]() . (8.57)
. (8.57)
На основу 8.57 даље следи
![]() . (8.58)
. (8.58)
На сл. 8.33 је приказано упрошћење шеме са сл. 8.32 коришћењем правила алгебре функције преноса.
Сл. 8.33 Упрошћење блок дијаграма управљана мотором у отвореној повратној вези
коришћењем правила алгебре функције преноса
Користећи релацију 8.58 блок дијаграм са сл. 8.33 се своди на још једноставну структуру, сл. 8.34.
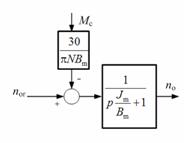
Сл. 8.34 Основна структура управљања мотором у отвореној повратној вези
На основу упрошћеног блок дијаграма струјног управљања мотором ЈС сл. 8.34 може се извести блок дијаграм регулације брзине.
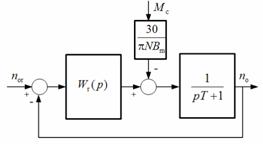
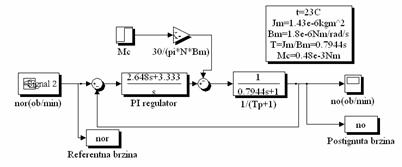
Сл. 8.35 Блок шема Simulink моделовања регулације брзине мотора ЈС
На основу ове добијене шеме могу се формирати одговарајући Simulink модели регулације са P, I, PI регулатором.
Задатак оваквог система регулације је да независно од дејства поремећаја - Coulumb-овог трења, оствари жељени квалитет регулације брзинског одзива како у стационарном стању тако и у прелазном режиму.
Израз за грешку стационарног стања је:
![]() (8.59)
(8.59)
Жељени квалитет понашања у стационарном стању може се исказати захтевом да је грешка стационарног стања сведена на нулту вредност, а у прелазном режиму захтевом за постизање жељене брине одзива система као и ограничењем дозвољеног прескока.
PI регулација брзине реалног мотора
Уопштена шема регулације брзине реалног мотора ЈС са дигиталним PI регулатором дата је на сл. 8.36. Детаљнија шематска представа регулације представљена ја на сл. 8.37. На основу ових шема формира се и Blok Diagram LabView програма за регулацију брзине реалног мотора.
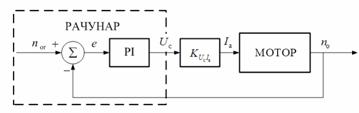
Сл. 8.36 Уопштена шематска представа регулације брзине реалног мотора
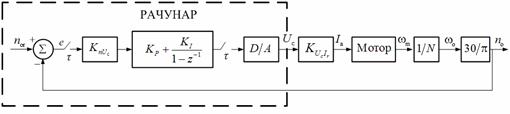
Сл. 8.37 Шематска представа регулације брзине реалног мотора ЈС коришћењем дигиталног PI регулатора
Циљ вежбе
§ Формирање Simulink модела на основу упрошћених блок дијаграма;
§ Анализа утицаја P, I, и PI регулације на понашање система у прелазном процесу и стационарном стању;
§ Анализа утицаја Coulumbovog трења на понашање система у прелазном процесу и у стационарном стању при P, I, и PI регулацији?
§ Избор параметара регулатора применом методе компензације и (модулног оптимума);
Задатак
P регулација
§ Графички
представити
брзине Simulink модела
мотора са и
без утицаја Coulumbovog трења
при ![]() и
и ![]() ;
;
§
§ Израчунати
грешку
стационарног
стања при ![]() и
и ![]() са
и без утицаја
Coulumbovog трења;
са
и без утицаја
Coulumbovog трења;
§ Израчунати
временску
константу
система са P
регулатором
за ![]() и
и ![]() .
.
§ Какав је утицај Coulumbovog трења на понашање система у прелазном процесу и у стационарном стању при P регулацији?
I регулација
§ Графички
представити
брзине Simulink модела мотора
са и без
утицаја Coulumbovog трења при ![]() ,
, ![]() и
и
![]() ;
;
§ Какав је утицај Coulumbovog трења на понашање система у прелазном процесу и у стационарном стању при I регулацији?
§ Колика је грешка стационарног стања при I регулацији система?
§ Какав повећање фактора појачања I регулатора на брзину трајања прелазног процеса?
§ Како повећање фактора појачања I регулатора утиче на величину прескока ?
§ Применом модулног оптимума изабрати фактор појачања I регулатора;
PI регулација
§ Колика је грешка стационарног стања при PI регулацији система?
§ Какав је утицај Coulumbovog трења на понашање система у прелазном процесу и у стационарном стању при PI регулацији?
§ Методом компензације пројектовати PI регулатор ако су захтеване перформансе:
· Нулта грешка стационарног стања;
·
Временска
константа![]() .
.
Упутство за рад
Simulink моделовање
P регулатор
На сл. 8.38. је приказан континуалан Simulink модел посматраног брзинског система са једним регулатором, формиран на основу симулационог модела са сл. 8.35.
Сл.
8.38 Simulink модел
брзинског
сервомеханизма
са P
регулатором
и фактором
појачања ![]()
За регулатор P типа следи:
![]() . (8.60)
. (8.60)
На основу израза за грешку стационарног стања 8.59 после замене 8.60 добија се:
![]() . (8.61)
. (8.61)
Као што је познато, у система са нултим астатизмом применом P регулатора не може се елиминисати грешка стационарног стања што је и потврђено изразом 8.61. Постојање поремећаја у виду константног Coulumb-овог трења додатно повећава ову грешку.
Такође, као што је поменуто, додавањем P дејства треба очекивати бржи одзив система него у отвореној повратној вези. Наиме, на основу блок дијаграма са сл. 8.35 после замене 8.60 добија се:
 . (8.62)
. (8.62)
На основу 8.62 временска константа система износи:
![]() , (8.63)
, (8.63)
док
је временска
константа
система у
отвореној
повратној
вези као што
је познато Т.
Из последње
релације се
види да
присуство пропорционалног
регулатора
смањује временску
константу
система ![]() , у
односу на временску
константу
мотора као
објекта управљања
Т, тј.
повећава
брзину
одзива.
, у
односу на временску
константу
мотора као
објекта управљања
Т, тј.
повећава
брзину
одзива.
I регулатор
Simulink модел посматраног брзинског система са једним I регулатором приказан је на сл. 8.39.
Сл.
8.39 Simulink
модел
брзинског
сервомеханизма
са I
регулатором
и фактором
појачања
интегралног
дејства ![]()
За регулатор I типа следи:
![]() , (8.64)
, (8.64)
где је.
![]() фактор
појачања
интегралног
дејства,
фактор
појачања
интегралног
дејства,
![]() временска
константа интегралног
дејства.
временска
константа интегралног
дејства.
Важна особина интегралног регулатора је да се његовим уношењем у систем елиминише грешка стационарног стања, када је на улаз доведен одскочни сигнал облика јединичне одскочне функције. Ово важи за све системе, па и за посматрани брзински систем статичког типа*. Наиме, на основу израза за грешку стационарног стања 8.59 после замене
![]() , (8.65)
, (8.65)
добија се
![]() . (8.66)
. (8.66)
Напомена: Све закључке везане за понашање система са I регулатором на кога делује поремећај у виду Coulumbovog трења у прелазном процесу извести на основу добијених графика.
PI регулатор
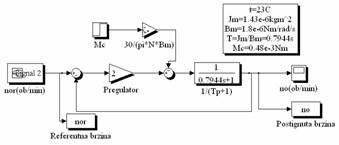
На сл. 8.40. је приказан континуални Simulink модел посматраног брзинског система са једним PI регулатором.
Сл. 8.40 Simulink модел брзинског
сервомеханизма
са PI
регулатором
и факториma
појачања
пропорционалног
дејства ![]() и
интегралног
дејства
и
интегралног
дејства ![]()
Функција преноса PI регулатора је облика:
![]() , (8.67)
, (8.67)
где
су ![]() - фактори
појачања
пропорционалног,
интегралног
дејства
- фактори
појачања
пропорционалног,
интегралног
дејства
Функција преноса PI регулатора се врло често среће и у следећој форми
![]() . (8.68)
. (8.68)
Из релација 8.67 и 8.68 следи веза:
![]() и
и
![]() . (8.69)
. (8.69)
Kao и код интегралног регулатора и код PI регулатора важи:
![]() , (8.70)
, (8.70)
па после замене 8.70 у израз за грешку стационарног стања 8.59 добија се
![]() . (8.71)
. (8.71)
Дакле, у стационарном стању се употребом PI регулатора (као и код I регулатора) за одскочни облик улазних сигнала елиминише грешка стационарног стања.
Напомена: Све закључке везане за понашање система са PI регулатором на кога делује поремећај у виду Coulumbovog трења у прелазном процесу извести на основу добијених графика.
PI регулација брзине реалног мотора
На
сл. 8.41. је
представљен
блок
дијаграм LABVIEW
програма за
регулацију
брзине
мотором формиран
на основу
шеме са сл. 8.37.
Жељени облик
сигнала
брзине, задат
референтним
сигналом
брзине ![]() се
множењем са
константом
се
множењем са
константом ![]() ,
одређеном
релацијом 8.58,
''своди'' на
ниво
управљачког
напона из
рачунара
,
одређеном
релацијом 8.58,
''своди'' на
ниво
управљачког
напона из
рачунара ![]() (I део
програма).
Постигнута
брзина
мотора после
редуктора се
такође на исти
начин
преводи на
ниво
управљачког
напона из
рачунара
(I део
програма).
Постигнута
брзина
мотора после
редуктора се
такође на исти
начин
преводи на
ниво
управљачког
напона из
рачунара ![]() . У
свакој
итерацији се
потом
формира
сигнал
грешке као
разлика
напона
. У
свакој
итерацији се
потом
формира
сигнал
грешке као
разлика
напона ![]() .
Овако
''сведен''
сигнал
грешке се
доводи на
улаз PI
регулатора
који даје
одговарајући
управљачки
напон
.
Овако
''сведен''
сигнал
грешке се
доводи на
улаз PI
регулатора
који даје
одговарајући
управљачки
напон ![]() (II део
програма).
Управљачки
напон из
рачунара
(II део
програма).
Управљачки
напон из
рачунара ![]() се
даље преко NI USB 6009
аналогног
излаза АО0
картице
доводи на
улаз
линеарног електронског
кола који у
свом моду 1)
има улогу
напонско - струјног
претварача,
преводећи
управљачки
напон
се
даље преко NI USB 6009
аналогног
излаза АО0
картице
доводи на
улаз
линеарног електронског
кола који у
свом моду 1)
има улогу
напонско - струјног
претварача,
преводећи
управљачки
напон ![]() у
управљачку
струју
ротора
мотора
у
управљачку
струју
ротора
мотора ![]() . У
вежби 1. је
наглашено да
се функција
преноса овог
актуатора у
моду 1) са
великом
тачношћу
може представити
блоком
појачања
. У
вежби 1. је
наглашено да
се функција
преноса овог
актуатора у
моду 1) са
великом
тачношћу
може представити
блоком
појачања ![]() .
.
Мотор
реагује
дајући
одговарајућу
брзину, а
оптички
енкодер
одговарајућу
поворку импулса
која се
доводи на
бројачки
улаз PFI0 NI
USB-6009 картице.
Брзина
мотора
пропорционална
је броју
импулса у
периоди
извршавања
петље (III део
програма)
која износи ![]() .
.
Мерење и праћење карактеристичних променљивих мотора: напона индукта, струје индукта, улазне снаге мотора и покретачког момента мотора омогућено је коришћењем аналогних улаза ai2 и ai3 (IV део програма).
Сл. 8.41 Блок Дијаграм регулације брзине мотора ЈС реализована применом програмског пакета LABVIEW
Слика 8.42 приказује мерну апаратуру за PI регулацију брзине мотора ЈС.

Сл. 8.42 Мерна апаратура за PI регулацију брзине мотора ЈС којим се струјно управља