8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5
Задатак вежбе: PI регулација брзине напонски управљаним микромотором једносмерне струје
Увод
Simulink модел
На основу упрошћеног блок дијаграма напонског управљања мотора ЈС у отвореној повратној вези датог на сл. 8.24, може се извести блок дијаграм регулације брзине
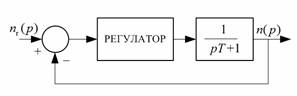
Сл. 8.24 Блок шема Simulink моделовања регулације брзине мотора ЈС
На основу ове добијене шеме могу се формирати одговарајући Simulink модели регулације са P, I, PI регулатором.
PI регулација брзине реалног мотора
Уопштена
шема регулације
брзине са
дигиталним PI
регулатором
дата је на
сл. 8.25. Детаљнија
шематска
представа
оваквог
управљања
представљена
ја на сл. 8.26.
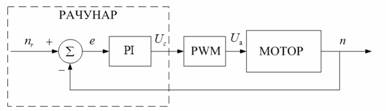
Сл. 8.25 Уопштени шематски приказ регулације брзине мотора
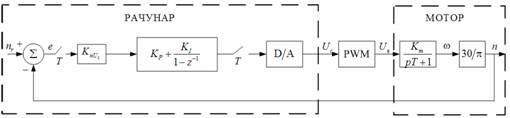 Сл. 8.26 Уопштени шематски
приказ
управљања
мотором у
затвореној
повратној
спрези коришћењем
PI
регулатора
Сл. 8.26 Уопштени шематски
приказ
управљања
мотором у
затвореној
повратној
спрези коришћењем
PI
регулатора
Циљ вежбе
§ Формирање Simulink модела на основу упрошћених блок дијаграма
§ Анализа утицаја P, I и PI регулације на понашање система у прелазном процесу и стационарном стању;
§ Избор параметара регулатора применом методе компензације и модулног оптимума;
§ Поређење резултата добијених мерењем са резултатима добијеним Simulink моделовањем;
Задатак
P регулација
§
Графички
представити
брзине Simulink
модела
мотора при ![]() ,
, ![]() и
и
![]() ;
;
§
Израчунати
грешку
стационарног
стања при ![]() и
и ![]() ;
;
§
Израчунати
временску
константу
система са P
регулатором
за ![]() и
и ![]() .
.
§
Применом
програмског
пакета LabView
снимити
брзине
реалног
мотора за ![]() ,
, ![]() и
и
![]() ;
;
I регулација
§
Графички
представити
брзине Simulink
модела
мотора при ![]() ,
, ![]() ,
, ![]() ;
;
§ Утврдити вредност грешке стационарног стања при I регулацији система.
§ Утврдити утицај I регулатора на брзину трајања прелазног процеса (на време успона и доминантну временску константу).
§ Одредити вредност фактора појачања интегралног дејства у брзинском одзиву када долази до појаве прескока? Анализирати како повећање фактора појачања I регулатора утиче на величину прескока.
§
Применом
програмског
пакета LabView
снимити
брзине
реалног мотора за ![]() ,
, ![]() ,
, ![]() ;
;
PI регулација
§
Графички
представити
брзине Simulink модела
мотора при ![]() и
и![]() ;
; ![]() и
и![]() ;
; ![]() и
и
![]() .
.
§ Утврдити вредност грешке стационарног стања при PI регулацији система.
§
Ако
се за исти
фактор
појачања
пропорционалног
дејства![]() ,
повећава фактора
појачања
интегралног
дејства
,
повећава фактора
појачања
интегралног
дејства ![]() , анализирати
времена
успона?
, анализирати
времена
успона?
§
Ако
се за исти
фактор
појачања
пропорционалног
дејства, ![]() ,
повећавањем
фактор
појачања
интегралног
дејства
,
повећавањем
фактор
појачања
интегралног
дејства ![]() , анализирати
прескок код
псеудопериодичних
одзива?
, анализирати
прескок код
псеудопериодичних
одзива?
§
Применом
програмског
пакета LabView
снимити
брзине
реалног мотора за при ![]() и
и![]() ;
; ![]() и
и![]() ;
;
§ Упоредити резултате моделовања са резултатима формираних Simulink модела.
Упутство за рад
Simulink моделовање
P регулатор
На сл. 8.27 је приказан континуални Simulink модел формиран на осниву функције повратног преноса 2.13. Модел посматраног брзинског система је са једним P регулатором.
. 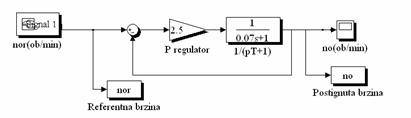
Сл. 8.27 Simulink модел посматраног брзинског сервомеханизма са P регулатором
и фактором појачања КP=2.5
Увођењем
P регулатора
не може се
елиминисати
грешка
стационарног
стања код
система
нултог
астатизма када
се на улаз доведе
одскочни сигнал
облика ![]() , али се
увођењем P регулатора
повећава брзина
одзива система.
, али се
увођењем P регулатора
повећава брзина
одзива система.
Наиме,
ако се на улаз
система доведе
одскочни сигнал
облика ![]() , а систем
је нултог астатизма,
као што је случај
са коришћеним
мотором JС важи да
је сигнал грешке
у стационарном
стању дат релацијом
, а систем
је нултог астатизма,
као што је случај
са коришћеним
мотором JС важи да
је сигнал грешке
у стационарном
стању дат релацијом
![]() , (8.38)
, (8.38)
где је
![]() [1], (8.39)
[1], (8.39)
константа
положаја, а
![]() -функција
повратног преноса
система
-функција
повратног преноса
система
Такође, као што је поменуто, додавањем P дејства треба очекивати бржи одзив система него у отвореној повратној спрези. Наиме, функција спрегнутог преноса система са P регулатором је облика
 . (8.40)
. (8.40)
Временска константа овог система износи
![]() , (8.41)
, (8.41)
док је
временска константа
система у отвореној
повратној спрези
![]() .
Из последње релације
се види да присуство
пропорционалног
регулатора смањује
временску
константу
система
.
Из последње релације
се види да присуство
пропорционалног
регулатора смањује
временску
константу
система ![]() , у односу
на временску константу
мотора као објекта
управљања
, у односу
на временску константу
мотора као објекта
управљања ![]() , тј.
повећава брзину одзива.
, тј.
повећава брзину одзива.
I регулатор
Simulink модел посматраног брзинског система са једним I регулатором приказан је на сл. 8.28.
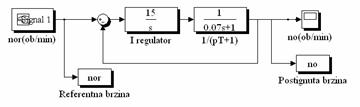
Сл. 8.28 Simulink модел посматраног брзинског сервомеханизма са I регулатором и фактором појачања интегралног дејства КI=15
Важна
особина
интегралног
регулатора
је да се
његовим
уношењем у
систем елиминише
грешка
стационарног
стања, када
се на улаз
доведе
одскочни
сигнал облика
![]() .
Ово важи за
све системе,
па и за
посматрани брзински
систем
статичког
типа. Наиме,
увођењем
интегралног
регулатора
функција повратног
преноса овог
система
постаје:
.
Ово важи за
све системе,
па и за
посматрани брзински
систем
статичког
типа. Наиме,
увођењем
интегралног
регулатора
функција повратног
преноса овог
система
постаје:
![]() . (8.42)
. (8.42)
Сада константа положаја има вредност која тежи бесконачности
![]() . (8.43)
. (8.43)
Ако
се на улаз
посматраног
система
доведе одскочни
сигнал
облика ![]() ,
сигнал
грешке у
стационарном
стању због 8.43,
постаће
једнак нули.
,
сигнал
грешке у
стационарном
стању због 8.43,
постаће
једнак нули.
![]() . (8.44)
. (8.44)
Следећа битна особина I регулатора је да се његовим увођењем мења ред система. Тако функција спрегнутог преноса посматраног система постаје другог реда
 . (8.45)
. (8.45)
Из (3.9) следи
![]() , (8.46)
, (8.46)
![]() , (8.47)
, (8.47)
где су
![]() фактор
пригушења,
фактор
пригушења,
![]() непригушена
природна
учестаност.
непригушена
природна
учестаност.
За
вредности
фактора
пригушења ![]() у
брзинском
одзиву система
доћи ће до
појаве
прескока -
одзив система
је
псеудопериодичан.
Зависност
прескока од
фактора
пригушења у
одскочном
одзиву
система
другог реда
се може
представити
изразом:
у
брзинском
одзиву система
доћи ће до
појаве
прескока -
одзив система
је
псеудопериодичан.
Зависност
прескока од
фактора
пригушења у
одскочном
одзиву
система
другог реда
се може
представити
изразом:
![]() . (8.48)
. (8.48)
На
основу
израза 8.47 и 8.48 се
види да ће
вишим
вредностима
фактора
појачања интегралног
дејства КI ,
одговарати
ниже
вредности
фактора
пригушења ![]() ,
односно више
вредности
прескока
,
односно више
вредности
прескока ![]() .
.
На
основу 8.46 и 8.47 се
види да
повећавањем
фактора појачања
интегралног
дејства КI
повећава
непригушена
природна
учестаност ![]() ,
а као што је
наглашено
фактор
пригушења опада,
па се на
основу
израза за време
успона:
,
а као што је
наглашено
фактор
пригушења опада,
па се на
основу
израза за време
успона:
![]() , (8.49)
, (8.49)
може закључити да тада оно опада.
Доминантна временска константа система са I регулатором износи
![]() . (8.50)
. (8.50)
На основу 8.50 следи да ће прелазни процес са интегралним регулатором траје дуже.
PI регулатор
На сл. 8.29. је приказан су континуални Simulink модел посматраног брзинског система са једним PI регулатором.
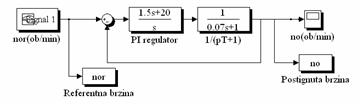
Сл. 8.29 Simulink модел посматраног брзинског сервомеханизма са PI регулатором
Функција повратног преноса са PI регулатором је облика:
![]() (8.51)
(8.51)
Као и
код интегралног
регулатора
константа
положаја тежи
бесконачност,
![]() .
.
Према
томе, PI
регулатор
има добру
особину
интегралног регулатора
да елиминише
грешку
стационарног
стања ако се
на улаз
система
доведе
одскочни сигнал
облика ![]() ,
,
![]() . (8.52)
. (8.52)
Функција спрегнутог преноса посматраног система са PI регулатором је облика:
 , (8.53)
, (8.53)
па
су фактор
пригушења ![]() и непригушена
природна
учестаност
и непригушена
природна
учестаност ![]() ,
редом:
,
редом:
![]() , (8.54)
, (8.54)
![]() . (8.55)
. (8.55)
Доминантна временска константа сада износи:
![]() . (8.56)
. (8.56)
На
основу
израза 8.56 следи
да трајање
прелазног
процеса код
оваквог
управљања
зависи само
од фактора
појачања
пропорционалног
регулатора. Повећавањем
![]() ,
доминантна
временска константа
се смањује
што
условљава и краће
трајање
прелазног
процеса. .
,
доминантна
временска константа
се смањује
што
условљава и краће
трајање
прелазног
процеса. .
Фактор
пригушења![]() ,
зависи и од
фактора
појачања
пропорционалног
регулатора
,
зависи и од
фактора
појачања
пропорционалног
регулатора ![]() и
од фактора
појачања
интегралног
дејства,
и
од фактора
појачања
интегралног
дејства, ![]() -израз
8.54. За
изабрану
вредност
-израз
8.54. За
изабрану
вредност ![]() , повећавањем
, повећавањем
![]() ,
опадаће
вредност
фактора
пригушења,
што на основу
8.48
условљава пораст
прескока
,
опадаће
вредност
фактора
пригушења,
што на основу
8.48
условљава пораст
прескока ![]() .
.
Пошто
за изабран
фактор
појачања
пропорционалног
регулатора ![]() , повећавањем
, повећавањем
![]() ,
опада вредност
фактора
пригушења
,
опада вредност
фактора
пригушења ![]() , а
непригушена
природна
учестаност
, а
непригушена
природна
учестаност ![]() ,
расте, на
основу
израза 8.49 може
се закључити
да време
успона
,
расте, на
основу
израза 8.49 може
се закључити
да време
успона ![]() ,
тада опада.
,
тада опада.
Дакле, PI
регулатор
има добру
особину I регулатора
да у
устаљеном
стању елиминише
сигнал
грешке ако
се на улаз
система
доведе
одскочни сигнал
облика ![]() , и
добру
особину
пропорционалног
регулатора
да смањује
трајање
прелазног
процеса тј. повећава
брзину
одзива.
, и
добру
особину
пропорционалног
регулатора
да смањује
трајање
прелазног
процеса тј. повећава
брзину
одзива.
PI регулација брзине реалног мотора
Жељени
облик сигнала
брзине, задат
референтним
сигналом
брзине ![]() , се прво
поступком
интерполације
измерених вредности
представљених
табелом 8.2. своди на ниво
управљачког напона
мотора
, се прво
поступком
интерполације
измерених вредности
представљених
табелом 8.2. своди на ниво
управљачког напона
мотора ![]() , тј. на
ниво
управљачког напона
из рачунара
, тј. на
ниво
управљачког напона
из рачунара ![]()
(I део
програма). Постигнута брзина се
такође на
описан начин
своди на ниво
управљачког напона
из рачунара ![]() (II део
програма).
Даље се у
свакој итерацији
сведена
постигнута
брзина одузима
од сведене
вредности жељеног
облика сигнала
брзине, формира
сигнал
грешке. Као
и при
управљању
мотором у
отвореној повратној
вези, на сл. 8.26.
је ради
једноставности
приказа ово
превођење
нивоа брзине
у ниво управљачког
напона
мотора, тј.
коначно на
ниво управљачког
напона из
рачунара,
представљено
једним блоком
са
константом
(II део
програма).
Даље се у
свакој итерацији
сведена
постигнута
брзина одузима
од сведене
вредности жељеног
облика сигнала
брзине, формира
сигнал
грешке. Као
и при
управљању
мотором у
отвореној повратној
вези, на сл. 8.26.
је ради
једноставности
приказа ово
превођење
нивоа брзине
у ниво управљачког
напона
мотора, тј.
коначно на
ниво управљачког
напона из
рачунара,
представљено
једним блоком
са
константом ![]() .
Овако ''сведен''
сигнал
грешке се
доводи на
улаз PI
регулатора
који даје
одговарајући
управљачки напон (III део
програма). D/A конверзија
врши се
посредством NI
USB-6009
картице.
Управљачки напон
из рачунара
.
Овако ''сведен''
сигнал
грешке се
доводи на
улаз PI
регулатора
који даје
одговарајући
управљачки напон (III део
програма). D/A конверзија
врши се
посредством NI
USB-6009
картице.
Управљачки напон
из рачунара ![]() се
даље преко NI USB-6009 аналогног
излаза
картице АО0
доводи на PWM конвертор
напона који
овај напон
преводи у
управљачки напон
мотора-
се
даље преко NI USB-6009 аналогног
излаза
картице АО0
доводи на PWM конвертор
напона који
овај напон
преводи у
управљачки напон
мотора- ![]() .
Настали сигнал
са оптичког енкодера
се сада преко
NI USB-6009 аналогног
улаза AI0 картице
доводи у рачунар,
где се преко
одговарајућег
блока мери његова
фреквенција,
ова преводи у
брзину
следеће
итерације.
.
Настали сигнал
са оптичког енкодера
се сада преко
NI USB-6009 аналогног
улаза AI0 картице
доводи у рачунар,
где се преко
одговарајућег
блока мери његова
фреквенција,
ова преводи у
брзину
следеће
итерације.
На
сл. 8.30. је
представљен Blok
Diagram LABVIEW програма
за управљање
мотором у
затвореној
повратној
спрези. И
овде је
периода
извршавања
петље
приближно ![]() .
Програм се
извршава
задат број
пута.
.
Програм се
извршава
задат број
пута.
На сл. 8.31. је приказан изглед мерне опреме коришћене при регулацији брзине мотора ЈС којим се управља напонски.
II део
програма III део
програма I део
програма![]()
![]()
![]()
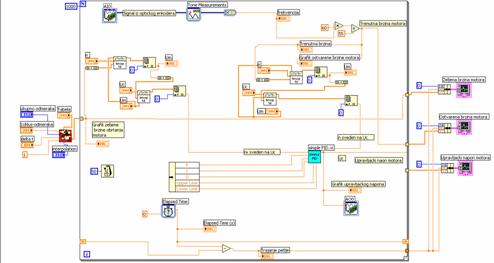
Сл. 8.30 Блок Дијаграм управљања мотором ЈС у затвореној повратној спрези реализована коришћењем програмског пакета LABVIEW
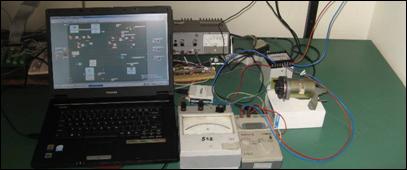
Сл. 8.31 Мерна апаратура за PI регулацију брзине мотора ЈС којим се напонски управља