8.2 ЛАБОРАТОРИЈСКА ВЕЖБА 2
Задатак вежбе: Израчунавање фактора појачања мотора напонским управљањем у отвореној повратној спрези
Увод
Преносна функција мотора којим се напонски управља
Када се за нулте почетне услове на једначине 2.2, 2.3 и 2.5 примени Лапласова трансформација добијају се следеће алгебарске једначине:
![]() , (8.8)
, (8.8)
![]() , (8.9)
, (8.9)
![]() . (8.10)
. (8.10)
Једначинама 8.8-8.10 одговара блок дијаграм на сл. 8.9. На основу ових једначина може се добити функција преноса једносмерног мотора управљаног струјом у колу ротора у следећем облику:
![]() , (8.11)
, (8.11)
где
су ![]() - фактор
појачања,
- фактор
појачања, ![]() - временска
константа и
- временска
константа и ![]() - релативни
фактор
пригушења
- релативни
фактор
пригушења
![]() , (8.12)
, (8.12)
![]() , (8.13)
, (8.13)
![]() . (8.14)
. (8.14)
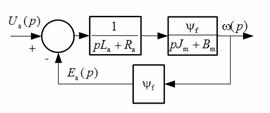
Сл. 8.9 Структурни блок дијаграм једносмерног мотора управљаног напоном ротора
Најчешће
за моторе
једносмерне
струје важи
да је
електрична
временска
константа
много мања од
механичке тј.
![]() ,
тако да се
при
моделовању
истих
вредност
индуктивности
кола ротора
може
занемарити
,
тако да се
при
моделовању
истих
вредност
индуктивности
кола ротора
може
занемарити ![]() .
Тада структурни
блок
дијаграм
може бити
представљен
као на сл. 8.10.
.
Тада структурни
блок
дијаграм
може бити
представљен
као на сл. 8.10.
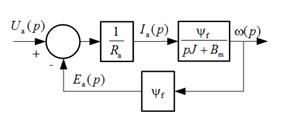
Сл. 8.10 Модификовани блок дијаграм једносмерног мотора управљаног напоном ротора
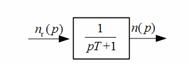
Функција преноса на основу блок дијаграма на сл. 8.10. постаје:
![]() , (8.15)
, (8.15)
где
је временска
константа ![]() :
:
![]() , (8.16)
, (8.16)
а фактор
појачања ![]() je исти
као у случају
je исти
као у случају ![]() :
:
![]() . (8.17)
. (8.17)
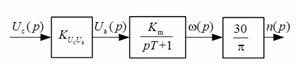
Сл. 8.11 Преносна функција мотора управљаног напонски
На
сл. 8.12. је
приказана шема
управљања
мотора у
отвореној
повратној
спрези. Управљачки
напон из
рачунара ![]() се
преко NI USB 6009
картице
доводи на PWM
конвертор напона
(фактора
појачања
се
преко NI USB 6009
картице
доводи на PWM
конвертор напона
(фактора
појачања ![]() ) који
даје
одговарајући
управљачки
напон мотора-
) који
даје
одговарајући
управљачки
напон мотора-
![]() .
Излазна
величина је
брзина
мотора
.
Излазна
величина је
брзина
мотора ![]() .
.
Сл. 8.12 Шематска представа управљања мотором у отвореној повратној спрези
Циљ вежбе
- Мерење
константе
 ;.
;. - Провера
вредности
константе
претварања PWM-a
 ;
; - Одређивање
непознатог
фактора
појачања мотора
 ;
;
Задатак
- Применом
програмског
пакета LabView и
напонског
управљања
мотора у
отвореној
повратној
вези за различите
вредности
управљачког
напона из
рачунара
 , измерити:
, измерити:
·
напоне
на индукту
мотора ![]() , и
, и
·
брзину
мотора ![]() , при
напону
извора PWM-a
, при
напону
извора PWM-a ![]() ;
;
·
Променом
вредности
управљачког
напона из рачунара
![]() ,
посматрати
промену
облика
сигнала са
оптичког
енкодера;
,
посматрати
промену
облика
сигнала са
оптичког
енкодера;
- Резултате приказати табеларно.
- На
основу
добијених
резултата
проценити вредности
.
- Проверити
да ли је константа
претварања PWM-a
 .када
је
.када
је  .
. - На
основу
резултата
мерења прорачунати
фактор
појачања
мотора .
Упуство за рад
II део
програма I део
програма III део
програма IV део
програма
![]()
![]()
![]()
![]()
![]()
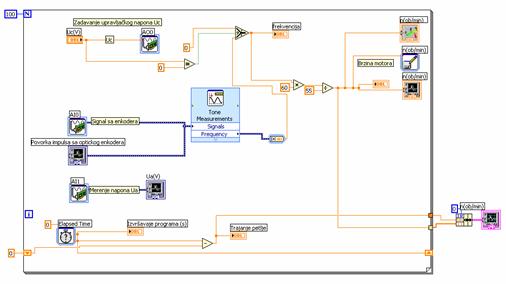
Сл. 8.13 Блок дијаграм управљања мотора ЈС у отвореној повратној спрези
реализована коришћењем програмског пакета LABVIEW
Применом
програма LABVIEW задају
се различите
вредности
управљачког
напон из
рачунара ![]() (I део
програма) дате
табелом 8.1. D/A
конверзија
врши се
посредством
NI USB 6009 картице.
Управљачки
напон
(I део
програма) дате
табелом 8.1. D/A
конверзија
врши се
посредством
NI USB 6009 картице.
Управљачки
напон ![]() се потом
преко NI USB 6009
аналогног
излаза АО0 картице
доводи на PWM
конвертор
напона који даје
одговарајући
управљачки
напон мотора
се потом
преко NI USB 6009
аналогног
излаза АО0 картице
доводи на PWM
конвертор
напона који даје
одговарајући
управљачки
напон мотора ![]() . При
мерењу је
потребно
подесити напон
једносмерног
напајања PWM-а на
вредност
. При
мерењу је
потребно
подесити напон
једносмерног
напајања PWM-а на
вредност ![]() .
Мотор на свом
излазу
поседује
оптички енкодер
за мерење
брзине са 55
окаца. Сигнал
са оптичког
енкодера,
поворка
импулса, се
повезује са
аналогним
улазом АI0
картице NI USB-6009, тј.
са рачунаром (II део
програма).
Информација
о брзини се
добија
мерењем фреквенције
поворке
импулса са
енкодера коришћењем
програмског
пакета LABVIEW (III део
програма), на
основу релације:
.
Мотор на свом
излазу
поседује
оптички енкодер
за мерење
брзине са 55
окаца. Сигнал
са оптичког
енкодера,
поворка
импулса, се
повезује са
аналогним
улазом АI0
картице NI USB-6009, тј.
са рачунаром (II део
програма).
Информација
о брзини се
добија
мерењем фреквенције
поворке
импулса са
енкодера коришћењем
програмског
пакета LABVIEW (III део
програма), на
основу релације:
![]() , (8.18)
, (8.18)
где је:
n - брзина
мотора ![]() ,
,
f - фреквенција сигнала са оптичког енкодера (Hz).
На
сл. 8.14 и сл. 8.15 приказани
су временски
облици
поворке
импулса са
оптичког енкодера
при брзинама
мотора ![]() и
и ![]() .
.
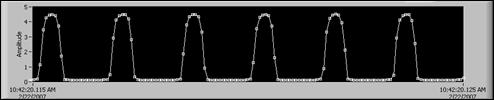
Сл. 8.14 Временски
облик
сигнала са
оптичког
енкодера за
брзину
мотора ![]()
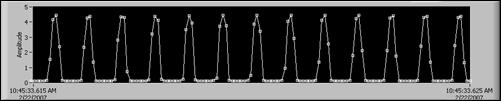
Сл. 8.15 Временски
облик
сигнала са
оптичког
енкодера за
брзину
мотора![]()
Напомена: Мерење брзине бројањем импулса у одређеном временском интервалу је чешће коришћен метод одређивања брзине мотора који поседује оптички енкодер, али пошто коришћени енкодер поседује релативно мали број окаца -55, овај начин детекције брзине се показао као недовољно прецизан.
Остварена брзина се у програму приказује графички и памти као текстуални фајл, који се може накнадно, применом програмског пакета MATLAB приказати и у додатно обрађивати.
Напон на намотајима индукта мери се коришћењем аналогног улаза АI1.(IV део програма).
Табела
8.2 Измерене
вредности
управљачког
напона
мотора ![]() , и
брзине
мотора
, и
брзине
мотора ![]() ,
,
за различите
вредности
управљачког
напона ![]() , и
при напону
извора
, и
при напону
извора ![]()
|
|
|
|
|
0.5 |
|
|
|
1 |
|
|
|
1.5 |
|
|
|
2 |
|
|
|
2.5 |
|
|
|
3 |
|
|
|
3.5 |
|
|
|
4 |
|
|
|
4.5 |
|
|
|
5 |
|
|
На основу добијених табличних вредности може се израчунати:
· константа превођења брзине мотора у напон на намотајима индукта мотора користећи релацију:
![]() , (8.19)
, (8.19)
·
константа превођења
управљачког
напона из
рачунара ![]() у управљачки
напон мотора
у управљачки
напон мотора
![]() према
релацији:
према
релацији:
![]() . (8.20)
. (8.20)
Одређивање
фактора
појачања
мотора ![]()
Ако
се као улазна
променљива
посматра жељена
вредност
брзине![]() , потребно
је блок шеми
са сл. 8.12 додати
константу
превођења
брзине n у
управљачки
напон из
рачунара
, потребно
је блок шеми
са сл. 8.12 додати
константу
превођења
брзине n у
управљачки
напон из
рачунара ![]() .
.

Сл. 8.16 Упрошћена шематска представа управљања мотором у отвореној повратној спрези
Од
мотора се
захтева да
прати жељени
облик сигнала
брзине, задат
програмски
преко
референтног
сигнала
брзине, ![]() . Да би
у
стационарном
стању брзина
мотора достигла
вредност
референтног
сигнала кад
. Да би
у
стационарном
стању брзина
мотора достигла
вредност
референтног
сигнала кад ![]() мора
да важи:
мора
да важи:
![]() . (8.21)
. (8.21)
На основу 8.21 следи:
![]() . (8.22)
. (8.22)
Пошто важи:
![]() , (8.23)
, (8.23)
следи израз за одређивање фактора појачања мотора:
![]() . (8.24)
. (8.24)
На основу израза 8.22 блок дијаграм управљања мотором у отвореној повратној спрези се своди на једноставан облик:
Сл. 8.17 Упрошћен блок дијаграм управљања мотором у отвореној повратној спрези